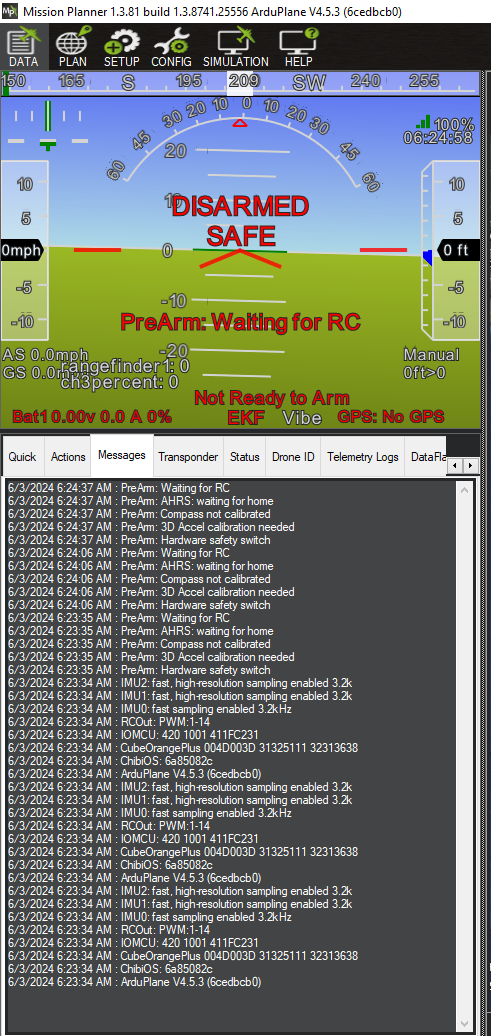
Problem: Hooking up any I2C component causes GPS module to be reported as bad (CAN ID 125). In addition to this, the autopilot hangs, as in GPS lights go out, arming switch (red light) goes out, no telemetry is sent.
- If I wait long enough it will burst information via telemetry radio (RFD900x) and then hang again.
- IF I ENABLE an SPD3x airspeed sensor the system will hang.
- If I ENABLE rangfinder1 by defining that variable from “none” to TFMini Plus I2C, the system hangs.
- I don’t have to actually attach either one of those devices in order to hang the system.
- The SPD3x airspeed sensor will only report airspeed if the BUS variable for ARSPD is set to 0. But doing so will hang the system also.
- Connecting the SPD3x airspeed sensor WITHOUT changing the BUS to 0 (keeping it as 1) will NOT hang the system but the sensor will NOT report airspeed.
Hang Me.param (20.9 KB)
I am using arduplane 4.5.3
I have a basic out of the box Cube Orange+ setup meaning I am using:
- The power brick it came with
- a 60A ESC,
- one servo that is attached and works correctly
- RC receiver connected to the S-Bus ports (Futaba brand)
- an RFD900x that works correctly on default settings.
- GPS is a HERE3 module, new and came with FW version 1.8 loaded.
*All of these components work with default values except that I had to measure battery current for the supplied power brick and manual input that in order to get it to work correctly.
*I have confirmed that the I2C cable is good via continuity checks and it is the cable that came with the brand new autopilot.
*The I2C bus splitter is assumed to be working but I have not confirmed it and it too came with the brand new autopilot.
*Connecting an I2C splitter with said I2C cable and nothing else hooked up to the I2C splitter does NOT cause the system to hang.
All other behaviors are normal, I can arm with plane (with all arming checks activated) and spin the prop motor.
Messages upon a fresh boot up:
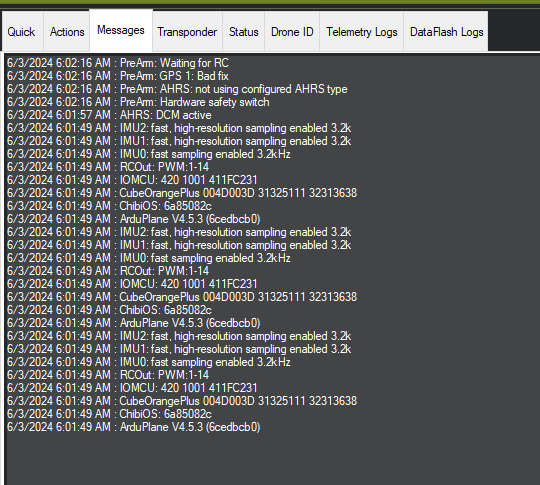
I flashed ardu copter and then re flashed to arduplane 4.5.3 in order to wipe out all parameters, these are the messages from a fresh install and bootup: