I am studying VIO slam. I’m using vins fusion. and I am having a problem with imu.
I made an imu in gazebo and i want to set the noise to 0.
The pic below is the imu setting of the gazebo urdf.
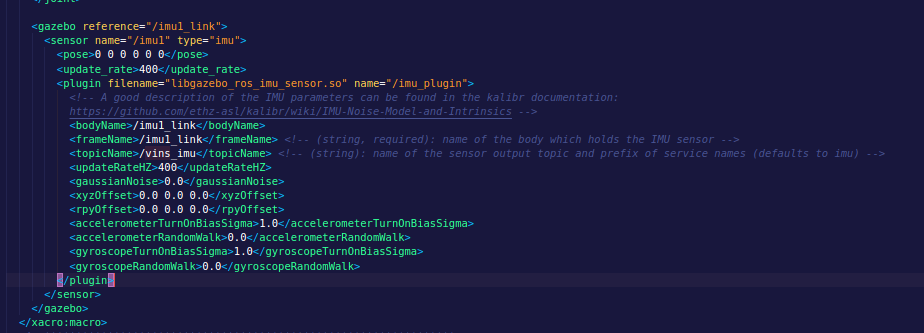
but imu data still have noise.
and if i set the vins fusion imu parameter as 0, its not good work…
so now i set the vins fusion imu parameter :
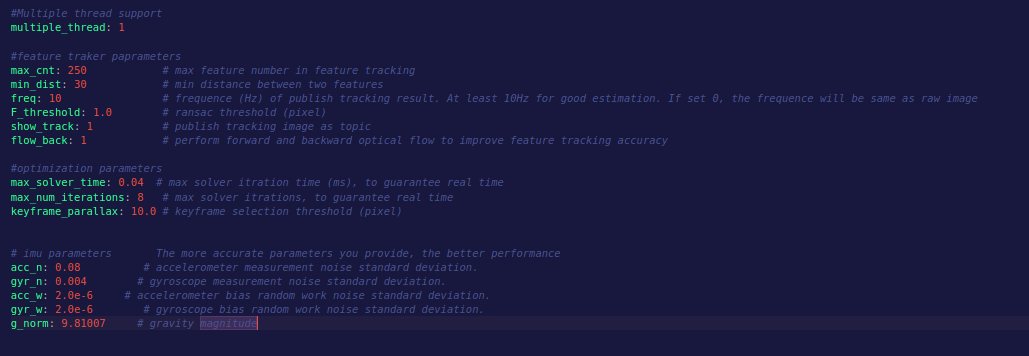
but its unstable when doing yaw motions…