Hello developers!
Thank you for the 4.3.7 update, I performed checks to restore control of the RC channel after signal loss, ArduPilot regains control of the RC. On version 4.2.0, I observed problems with random appearances, which could only be fixed by switching RFD868.
It was hard to figure out how to install an RPM sensor on a nitro ICE - OSMAX FS62V , but I managed to install two magnets on the propeller support sleeve. I now have the opportunity to doing this section of the RPM Sensor Based Dynamic Notch Setup for my Durandal, but I have questions:
I ask you to explain the INS_HNTCH_MODE parameter that I use with the RPM sensor for an internal combustion engine. In my case, I chose the value of the parameter INS_HNTCH_MODE = 2. Will Dynamic Harmonic Notch Filters affect two IMUs? I see another INS_HNTCH_OPTS option: Harmonic Notch Filter options Complete Parameter List — Copter documentation
The value of the parameter INS_HNTCH_OPTS = 3 EnableOnAllIMUs, I realized that this enables the Harmonic Notch Filter on two IMUs.
I need to apply Dynamic Harmonic Notch Filters to two IMUs. How to do it right?
I also saw an opportunity for testing to get a Sample pre- and post-filter, if I set the parameter LOG_BAT_OPT = 4, this will reduce the time to analyze the effectiveness of the Harmonic Notch Filter. Will this affect the CPU load of the DURANDALL flight controller? I plan to conduct tests on the ground, when the plane flies I will turn off the logging recording INS_LOG_BAT_OPT = 0.
I got a successful result, dynamic filters work with the RPM sensor. This works on two IMUs. Thanks to the developers of the ARDUPILOT program for their effective work.
I ask for the help of developers and experienced colleagues in assessing the correctness of my actions to configure dynamic filters. I am interested in the possibility of reducing low-frequency vibrations
Tests of the DOMINO UAV with an internal combustion engine after installing vibration isolators between the motor mount flange and the first frame. Trener DOMINO SIZE .46-.55 GP/EP SCALE 1:6 ARF, Holybro Durandal FW 4.3.7 ARDUPLANE, engine OSMAX FS62V. Link to the video: Испытания виброизоляторов на самолёте DOMINO - YouTube The reason for the work to eliminate the influence of vibration from the internal combustion engine was the first flight of DOMINO (link Testing trener DOMINO, Holybro DURANDAL and Internal Combustion Engines (ICE) - YouTube ), as a result of which failures in the operation of the AHRS were revealed, and specifically the conversion of the EKF3 to DCM, as well as to eliminate errors EKF3 switched to filters called “LANE”, which represent Airspeed, Barometer, GPS and Magnetometer, so in the first flight DOMINO was not affected due to malfunctions gyroscopes, because non-IMU sensors were included to assess the orientation.
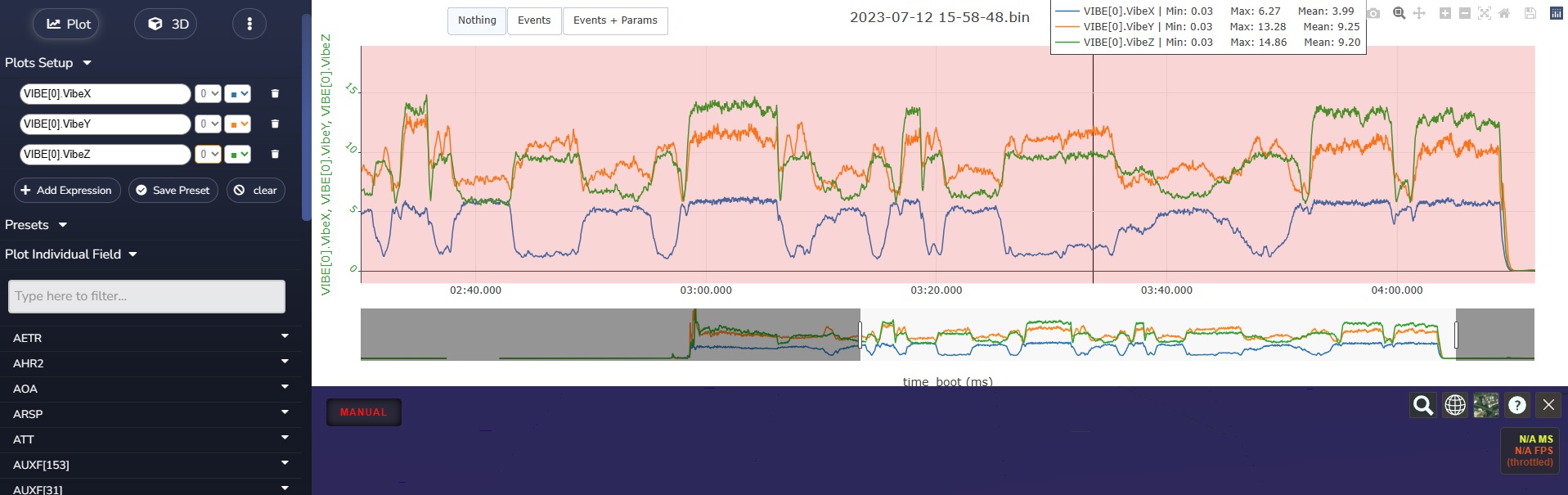
According to the test results, a positive result was obtained from the use of vibration isolation, the vibration level decreased to acceptable values.
In the documentation for the ardupilot (link Measuring Vibration — Plane documentation ) there are the following recommendations:
Vibration levels below 30 m/s/s are generally acceptable. Levels above 30 m/s/s can have problems, and levels above 60 m/s/s almost always have problems with position or altitude retention. So, this fact is confirmed by my first flight, since the vibration level exceeded 60 m / s / s and indeed there were problems with altitude retention in AUTO mode.