On gcs, we have also confirmed that rtk is properly connected.
First of all, I carried out a mission to take off and land 10m from my quadcopter’s auto mission.
The error range was too large.
I think the RTK did not work.
Is there a way to tell if the RTK is working properly or not?
I have no other GPS
Use the RTK as a GPS.
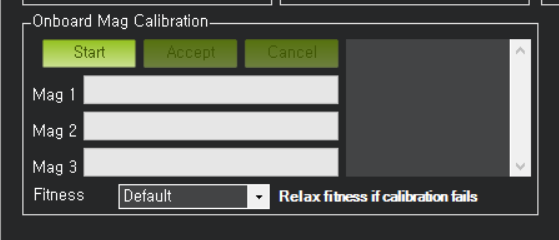
In the Mission Planner, enter Compass Calibration and press Start
mag # 1 and mag # 2 have gauges but mag # 3 do not
(mag # 3 is an RTK)
Does the RTK need a separate mag calibration?
Or is there another way?
By error to large do you mean meters or ten’s of centimeters from where you took off? I have noticed that sattelite constelation is a crutical part in RTK mapping and navigation, If you were in RTK float then your positon will not be as accurate as RTK fix. If you did not have a fix solution then a few centimeters 50-10 would be understandable. I don’t have much knowledge with CUAV RTK, Often times the longer the base station can run the better the correction is, how long was the base connected to your ground control running?
Thank you for your hottest answer.
RTK confirmed that it is FIXED state.
The ground station was waiting for about 15 minutes.
I’m curious if you are using C-UAV RTK or HERE + RTK modules, and if this replaces regular gps (using RTK as GPS)
Do you need to setup the initial setup -> compass just like a regular GPS module?
I did compass calibration like a regular GPS module.
However, this green gauge’s mag # 3 will not come up
(here rtk, the gauges of mag # 3 will go up, but when the other gauges are full, they go back to zero and start again)
@Ricoman
I am using an emlid reach RTK GPS unit. So unsure about the compass calibration, as I use the one that is in my Non-RTK GPS.
when setting up RTK you need to make sure and have the GPS_TYPE (1 or 2) set to auto if you have 2 GPS units, I also believe that the code will also detect when a new GPS is hooked up. The next thing you need to do is make sure you hav GPS_INJECT_TO selected to the correct GPS unit that you would like the send the corrections to.
The range was 2.00 m (default).
I would like to pursue accurate takeoffs and accurate landings, no matter the accuracy.
So I set 0.01m.
I have not tried flying yet.
I am afraid that the helicopter will give up its stability to meet this range.
I am curious about the ServeyIn Acc value you set, how much error did the helicopter show when you set that value?