I have a Pixhawk 2.4.8, I use the 3DR Power module to power the FMU and use a 2S 8.4V LiPo to power the servo rail without a Zener diode, according to Powering the Pixhawk.
In Mission Planner, I got “Prearm Board (6.6V) out of range 4.3-5.8V” which prevented me to arm the system. I know if I uncheck the arming check on board level, this Prearm error will go away, but I am afraid that the Pixhawk will be fried very soon.
I used the multi-tester to verify that the 3DR power Module did produce 5V. If I disconnect the 3DR power module, but only connect the 8.4V on the servo rail without a Zener diode, I can see this Pixhawk really powered up. Is this normal?
How comes I follows the “Powering the Pixhawk” document but still got the prearm error? I thought without a Zener diode, the 8.4V on servo rail will not power the Pixhawk FMU itself.
The servo rail can supply servos requiring up to 10.5V (but not also power the Pixhawk). Voltages above 5V cannot be used to power the Pixhawk via the servo rail. In this case the Zener diode must not be used .
That means you MUST NOT apply greater than 5V to the power input of the autopilot. In other words, if you power the servo rail with greater than 5V, you cannot use that as a direct power source for the autopilot.
What am I suppose to do? I need 8.4V to give enough torque to the cyclic digital servos, but I don’t want to fry my Pixhawk.I am using 3DR power module to power the Pixhawk, and 8.4V on servo rail without a Zenor diode. Is it O.K. to do so (I think the document suggest this)? Why did I get Prearm board level error?
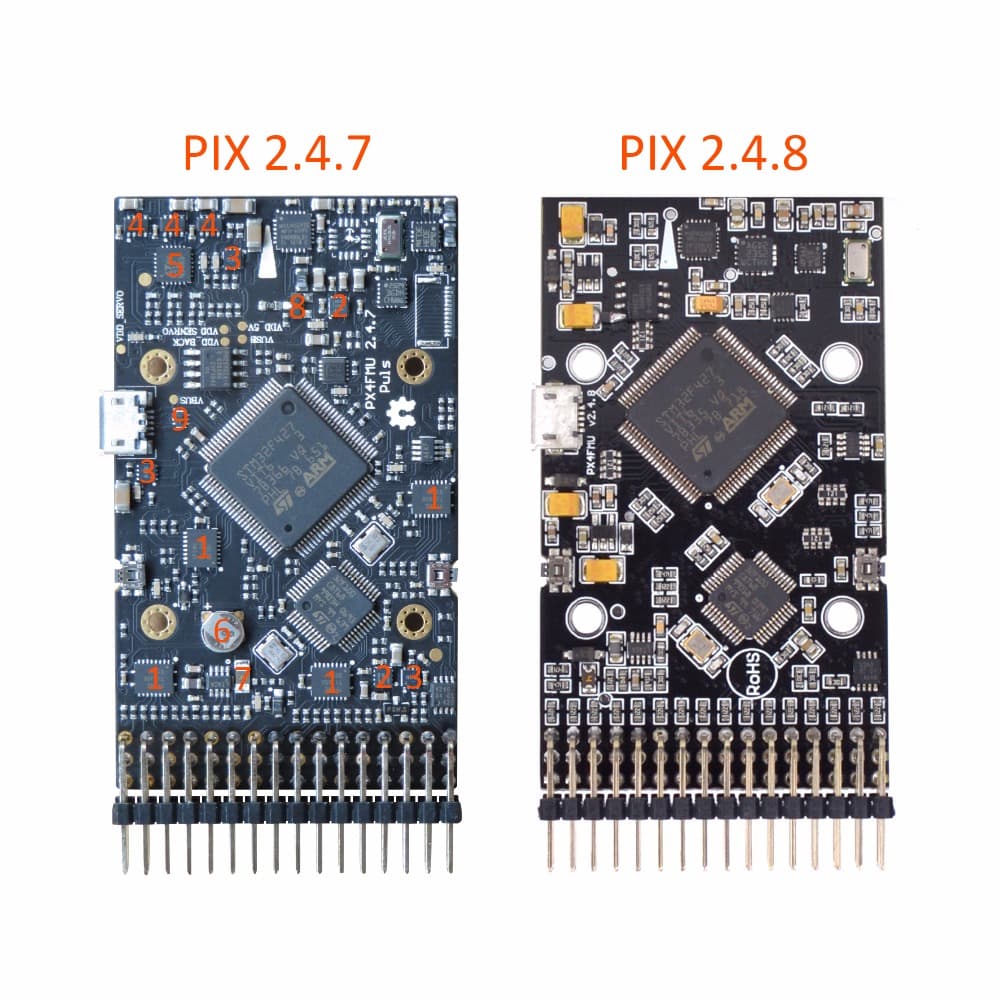
You should get a real Pixhawk board. There is no such thing as Pixhawk 2.4.8, it is a common name for cheap Chinese clones, where the power management circuitry is often replaced with some diodes (in best case). These clones are not really happy about anything on the servo rail above 5V, and sometimes just goes poooffff even when powered correctly.
You can check if there is any power on the servo rail when the pixhawk powered on, if there is anything then it is a crap and don’t use for anything that supposed to fly.
I just checked the servo rail when my Pixhawk 2.4.8 was powering up, the voltage is 0 in the servo rail, It seemed to be designed correctly in this aspect (the same as the Pixhawk 1).
GeoMuir
I also need to connect a nitro engine RPM sensor (Hall effect) to the Aux6 port of the Pixhawk (served as GPIO input). How am I able to achieve that if I use the Frsky RB-10 Redundancy Bus? What’s the ways to connect the Pixhawk, Frsky RB-10, servos, and RPM sensor together?
Where to buy a reasonable priced Pixhawk 2.4.7? Is Pixhawk 2.4.7 immune of the problems I have? Beside the Pixhawk 2.4.8, all of the autopilot boards are very expensive.
You’re missing the point. There is no valid product called “Pixhawk 2.4.8.” It’s a misnamed, cheap clone of something else that is probably trademarked.
To better answer your question, what’s your budget?
The 2.4.8 costs around $100 in Aliexpress. What are the similar priced ones with better quality (with the same or more numbers of Main and Aux ports)? Where to buy them?
For the same price you could go with a Matek H743-Wlite. H7 processor, better IMU, better baro, direct voltage battery input to 6S, current and voltage monitoring, more UARTS, 12 outputs though not 14.
If you want 2 IMU’s the Wing version of the board for ~$25 more. Widely available, a few sources domestic US.
Thank for your information on my previous problem (Prearm Board Voltage out of range) on Pixhawk 2.4.8. The 2S LiPo did not fry the board after testing it for several days. However, I found out that the nitro RPM hall effect sensor that connected to Aux6 (configured as GPIO input) of my Pixhawk 2.4.8 will not have a reading if the servo rail is powered by the 2S 8.4V LiPo. If I use a Switching BEC (5V) to power the servo rail, the RPM sensor will work in the Pixhawk 2.4.8. However, all of my digital servos need at least 6.0 volt to operate.
I am seriously considering the Matek H743 Wing, but definitely need to make sure the RPM sensor will work on servo rail powered by 2S LiPo 8.4V. Have you ever tested the RPM sensor on Matek H743-Wing on HV servo rail?
Also, I checked the Matek’s website, still have no idea about connecting my SikTelemetry radio on the autopilot. What kind of connector should it use to connect to the autopilot?
You’re really getting hung up on the servo rail voltage. It’s simply a convenient way to provide a custom voltage to all peripherals that need full VBat or UBEC output voltage. Most sensors use 3v3 or 5V, which is available on any number of other peripheral ports or via most UBEC or PDB solutions. Power each component with the appropriate input voltage. Use a common ground for most peripherals unless you need to fully isolate something.
2S works on the H743-Mini for sure as I had a 2S Li-Ion flying on one for awhile. Obviously the 8V BEC didn’t work. But, it’s rate for 2S so I suppose that answer doesn’t help.