I am currently programming a drone using Python and the DroneKit library.
For simulation purposes, I have installed SITL and Gazebo following the instructions provided here:
Using SITL with Gazebo
https://ardupilot.org/dev/docs/sitl-with-gazebo.html#using-sitl-with-gazebo
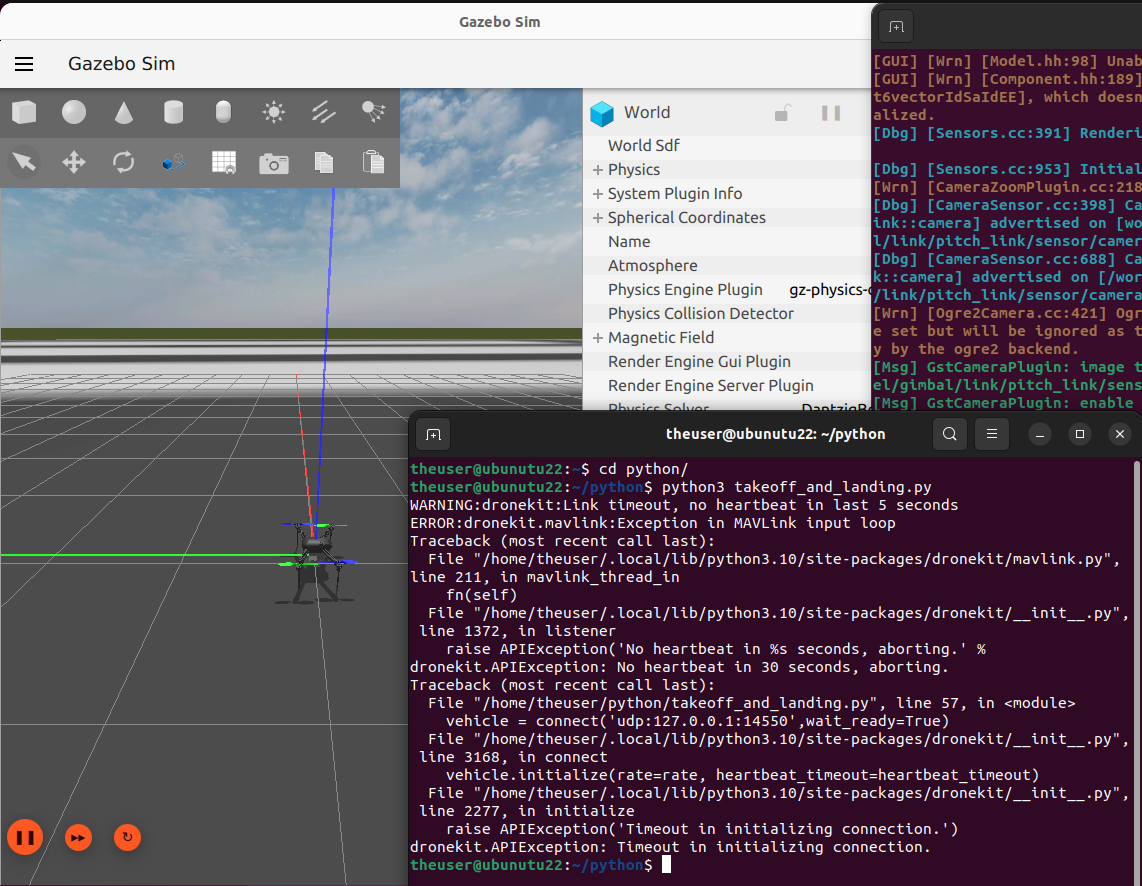
While I was able to set up the simulation successfully, I am encountering an issue where my Python script cannot access the virtual drone within Gazebo.
Are there any additional steps I need to take to enable access from Python?
#############DEPENDENCIES#######################
takeoff_and_landing.py
from dronekit import connect, VehicleMode,LocationGlobalRelative,APIException
import time
import socket
For python3 we should delete “import exceptions”
import math
##############FUNCTIONS##########################
##Function to arm the drone props and takeoff at targetHeight (m)#
def arm_and_takeoff(targetHeight):
while vehicle.is_armable!=True:
print("Waiting for vehicle to become armable.")
time.sleep(1)
print("Vehicle is now armable")
vehicle.mode = VehicleMode("GUIDED")
while vehicle.mode!='GUIDED':
print("Waiting for drone to enter GUIDED flight mode")
time.sleep(1)
print("Vehicle now in GUIDED MODE. Have fun!!")
vehicle.armed = True
while vehicle.armed==False:
print("Waiting for vehicle to become armed.")
time.sleep(1)
print("Look out! Virtual props are spinning!!")
vehicle.simple_takeoff(targetHeight)
while True:
print("Current Altitude: %d"%vehicle.location.global_relative_frame.alt)
if vehicle.location.global_relative_frame.alt>=.95*targetHeight:
break
time.sleep(1)
print("Target altitude reached!!")
return None
############MAIN EXECUTABLE#############
####sim_vehicle.py opens up port on localhost:14550
vehicle = connect(‘127.0.0.1:14550’,wait_ready=True)
####Arm the drone and takeoff into the air at 5 meters
arm_and_takeoff(5)
print(“Vehicle reached target altitude”)
####Once drone reaches target altitude, change mode to LAND
vehicle.mode=VehicleMode(‘LAND’)
while vehicle.mode!=‘LAND’:
print(“Waiting for drone to enter LAND mode”)
time.sleep(1)
print(“Vehicle now in LAND mode. Will touch ground shortly.”)
#######################################################################