Hi,
I believe, you will need more information.
When you see the parameter below, may be you will not believe that I had no problem with the flight modes
- Stabilize Mode
- Alt Hold Mode
- Loiter Mode
- RTL
- Auto Mode together with Circle. The only Problem is.
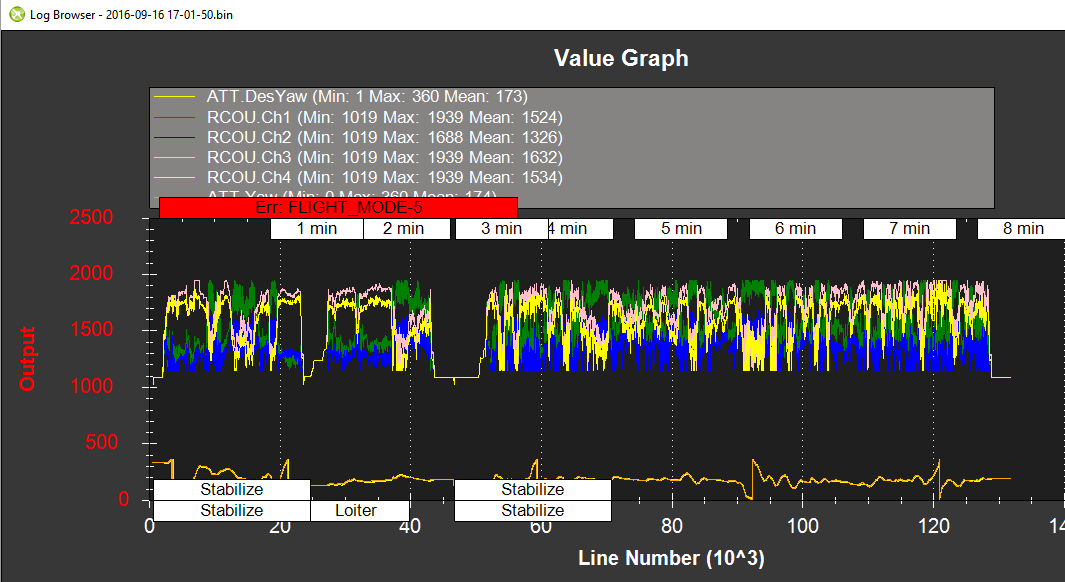
I just can’t control the heading (yaw) of the Copter.
Here are parameters of the last 3 flights.
Analyses of flight 1)
Log File C:\Users\r\AppData\Local\Temp\tmp191C.tmp.log
Size (kb) 35496.9208984375
No of lines 438234
Duration 0:25:30
Vehicletype ArduCopter
Firmware Version V3.3.3
Firmware Hash acf2e10c
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = NA -
Test: Balance/Twist = NA -
Test: Brownout = FAIL - Truncated Log? Ends while armed at altitude 14.59m
Test: Compass = GOOD - mag_field interference within limits (21.10%)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = FAIL - ERRs found: FLT_MODE CRASH
Test: GPS = FAIL - Min satellites: 0, Max HDop: 99.99
Test: IMU Mismatch = GOOD - (Mismatch: 0.12, WARN: 0.75, FAIL: 1.50)
Test: Parameters = GOOD -
Test: PM = NA -
Test: Pitch/Roll = NA -
Test: Thrust = NA -
Test: VCC = FAIL - VCC below minimum of 4.6v (4.089v)
Parameter of fligt 1)
File to big
Analyses of flight 2)
Log File C:\Users\r\AppData\Local\Temp\tmp90.tmp.log
Size (kb) 7208.974609375
No of lines 91089
Duration 0:08:15
Vehicletype ArduCopter
Firmware Version V3.3.3
Firmware Hash acf2e10c
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = NA -
Test: Balance/Twist = NA -
Test: Brownout = GOOD -
Test: Compass = FAIL - Large change in mag_field (57.19%)
Max mag field length (628.19) > recommended (550.00)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = FAIL - ERR found: CRASH
Test: GPS = GOOD -
Test: IMU Mismatch = GOOD - (Mismatch: 0.27, WARN: 0.75, FAIL: 1.50)
Test: Parameters = GOOD -
Test: PM = NA -
Test: Pitch/Roll = NA -
Test: Thrust = NA -
Test: VCC = GOOD -
Parameter of fligt 2)
2016-09-16 16-51-16.bin (3.3 MB)
Analyses of flight 3)
Log File C:\Users\r\AppData\Local\Temp\tmp1129.tmp.log
Size (kb) 10389.2939453125
No of lines 131895
Duration 0:08:17
Vehicletype ArduCopter
Firmware Version V3.3.3
Firmware Hash acf2e10c
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = NA -
Test: Balance/Twist = NA -
Test: Brownout = GOOD -
Test: Compass = FAIL - Large change in mag_field (58.21%)
Max mag field length (602.79) > recommended (550.00)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = FAIL - ERR found: FLT_MODE
Test: GPS = GOOD -
Test: IMU Mismatch = GOOD - (Mismatch: 0.15, WARN: 0.75, FAIL: 1.50)
Test: Parameters = GOOD -
Test: PM = NA -
Test: Pitch/Roll = NA -
Test: Thrust = NA -
Test: VCC = GOOD -
Parameter of fligt 3)
File to big with 4.5 MB