Hello guys, I’ve been making a maiden flight for a big quad (135kv motors, 28" propellers, 6S Lipo, MRO Pixhawk)
I did an autotune on roll and pitch axes, it went perfect, the copter behaved perfectly. After the autotune I did a test flight, after like 10 minutes, the quad started to descend quickly and hit the ground, I switched from loiter to stabilize and hit max throttle, but it didn’t help…
I can’t figure it out what is wrong. Can somebody please look at the telemetry log to see what happened, I couldn’t find anything suspicious.
seems like motor/esc fail.
motor 2 failed (maybe thermal throttling? esc fail/motor fail) and goes to max,
other motors try to compensate for yaw and lower throttle. Motor 7 goes to almost zero.
I concur. However, it was a partial failure or a throttle back since it did not crash. Btw, pwm 1700 for loitering seems a little bit high, isn’t it underpowered ?
Hello guys, I’ve finally changed the ESC’s and the problem was an ESC fault, most probably at motor 2, as amadeus suggested.
Thank your for your kind help, love this community.
Regards,
Sarge
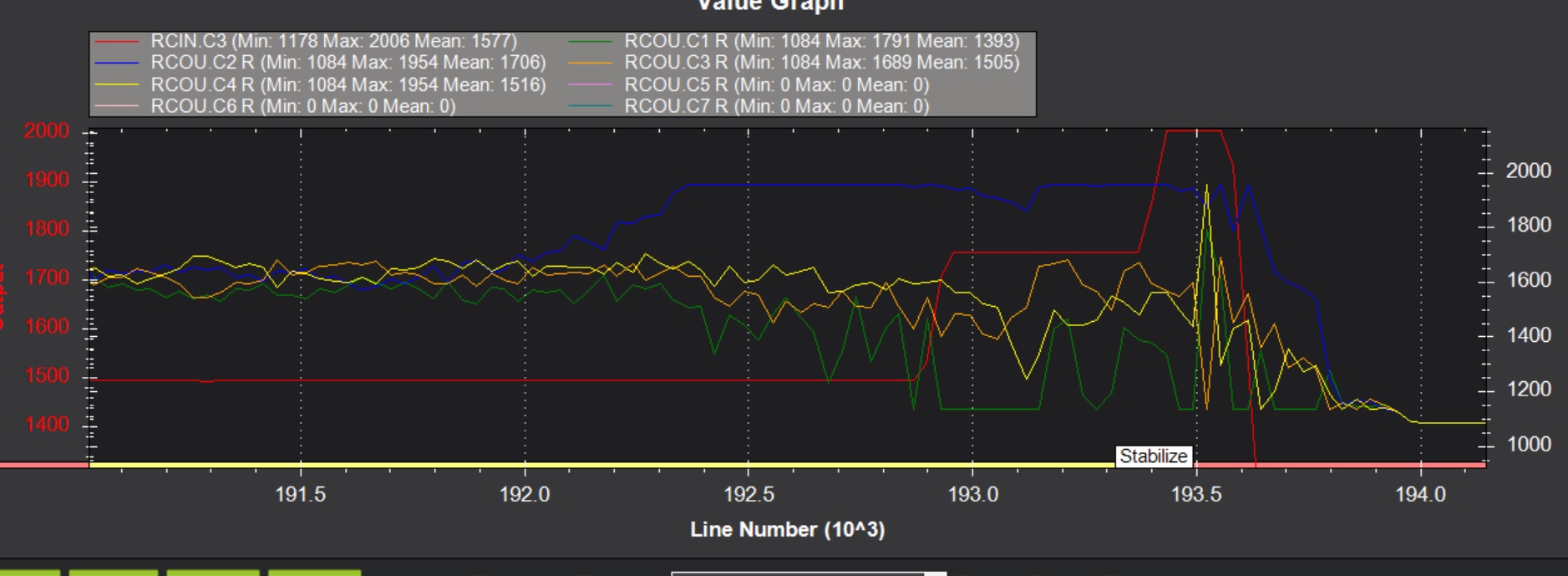
 it was motor 2 at 100% and motor 1 at 0% (for compensation)
it was motor 2 at 100% and motor 1 at 0% (for compensation)