Hi Guys, this is my first topic in Ardupilot Forum, i’m brazilian, forgive my english mistakes
We are facing a problem maintaining the altitude on position hold mode, after take off, the drone climbs by itself until we put in close to the minimum throttle.
We check the Throttle stick and he is in middle position with middle PWM.
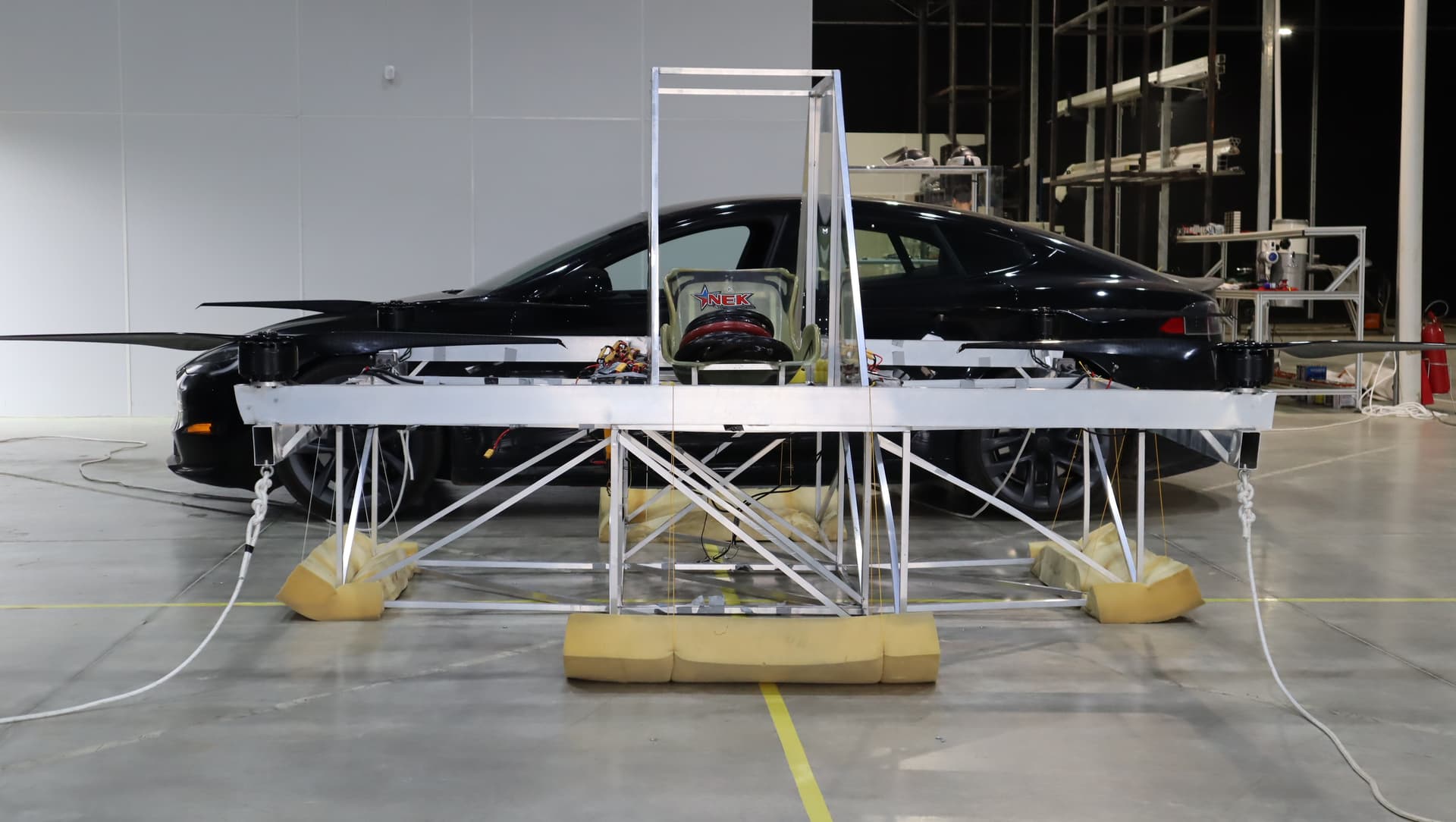
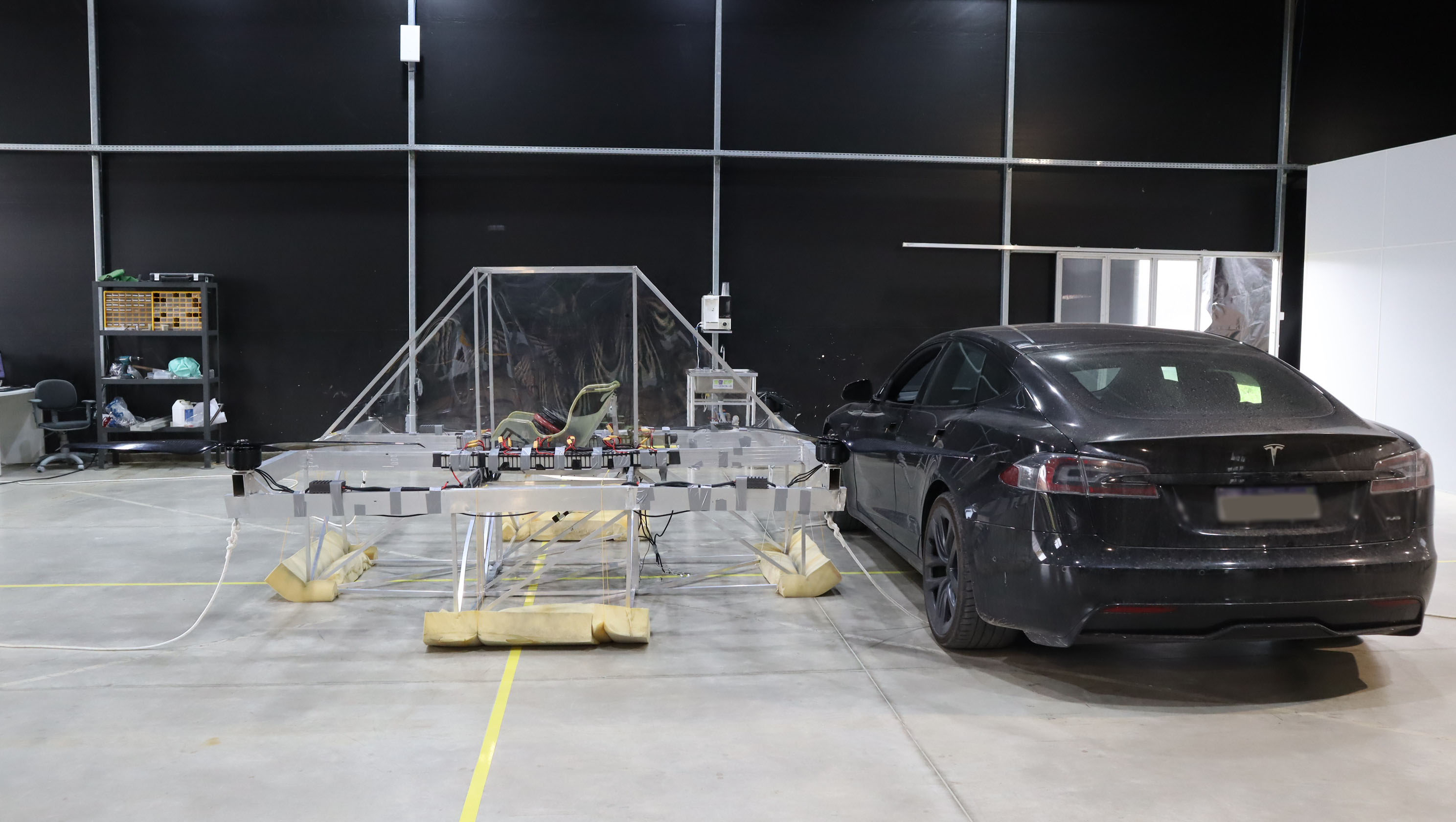
Some Valid info: The drone has four motor with 62 inch props and a structure with 2.65m x 2.65m, total weight 210 kg (462 lb).
We know about the Yaw error/drifting (and don’t know how to solve )
You don’t have battery logging. And this craft looks to be underpowered/overweight as can be seen by the average RC out value and the learned Hover thrust value. Your Rate filters are not right for this size craft either. How did you arrive at those Rate P&I values?
Hi Dave! You are right, we don’t have the battery logging because we are using 24 packs of 24s(100v) Li-Ion Batteries and we don’t know how to make Pixhawk read that.
We are using P42A Molicel Cell, the voltage and current are enough for the system, the voltage is dropping 10v Max, we tested and it seems to be okay.
About the P&I values, we guess and test, this log that I post, the drone are really stable and flying nicely, the 2 problems are the yaw and the altitude hold ( he keeps climbing).
Didn’t say they were wrong just curious how you determined then. From this log you can’t tell how well it’s tuned as there is no Pitch and Roll.
Suggest plugging in 62" props and 24S to the Initial Parameter setup screen and use those values. It’s still overweight.
If nothing else use a simpe voltage divider to get Vbat down to 3V max. 5k/150ohm would work or similar ratio.
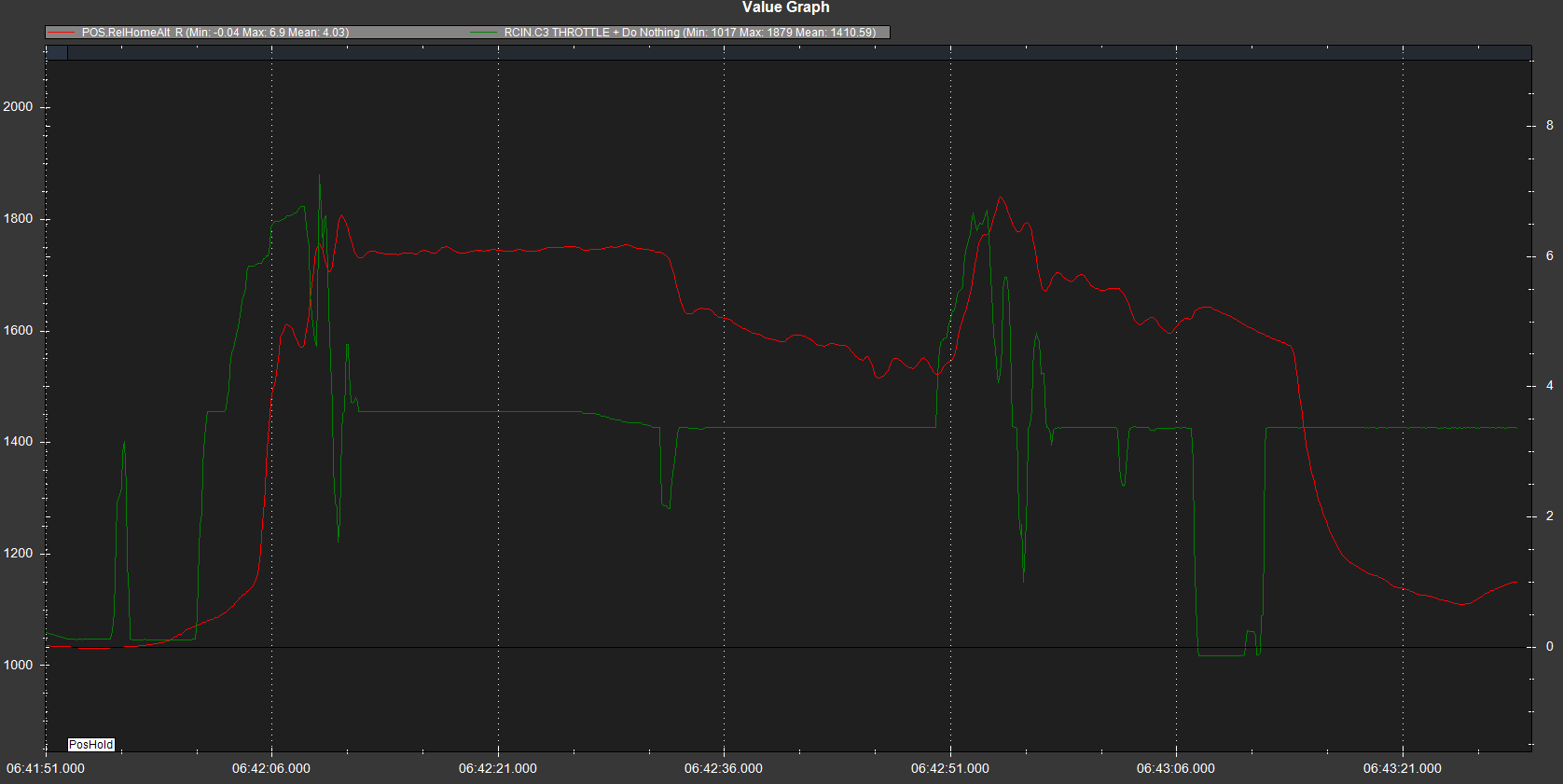
I expected to see motors at minimum when opening this log. Instead motors are at nearly maximum. If you have a payload or dummy payload fitted you might want to at least reduce that for testing so hover motor output is around 1500 to 1600 PWM.
Test and tune at the minimum possible take off weight.
Later, when everything is just right, you can add a payload and alter these parameters to suit:
new ATC_ACCEL_P_MAX = ATC_ACCEL_P_MAX x (min_TOW / max_TOW)
new ATC_ACCEL_R_MAX = ATC_ACCEL_R_MAX x (min_TOW / max_TOW)
new ATC_ACCEL_Y_MAX = ATC_ACCEL_Y_MAX x (min_TOW / max_TOW)
Yaw imbalance will be frame twist or motors not all perfectly aligned. If there’s something physical you fix now that will be better than fighting it all the way through tuning.
You need to be testing in AltHold and Stabilise. This will help the hover learn. You will also need these modes if anything goes wrong.
Once it’s stable and tuned more, use Loiter instead of PosHold.
In this graph you can see it was actually working and hovering when throttle was centred. The reason for not wanting to descend is the stability and tuning. The flight controller is trying to maintain stability and not able to reduce average motor outputs. Also thrust expo is wrong.
If you’ve got a spring-centred throttle then set
PILOT_THR_BHV,7
Now, to start over… Set up a voltage monitor at least. Maybe there is too much current for you to monitor but that would be nice if you can do it. Voltage monitor is vital and you shouldnt really fly without it.
Use the Initial Parameters calculator in MissionPlanner - it may not accept your prop size, but put in the largest it will accept and use those values. Also put in your battery type and cells.
Accept all optional params it offers, especially the battery failsafe values. No need to use the T-Motor Flame settings unless you actually have those ESCs. Set FENCE_ENABLE,1 and wait for home position to be set before being able to arm
For this beast you will need to print out the Tuning instructions and work through them step by step. Cross off the steps as you go. Read about transmitter tuning - very useful.
Set INS_LOG_BAT_MASK,7 to gather data for the Harmonic Notch filter https://ardupilot.org/copter/docs/tuning-process-instructions.html
Come back with new logs as things progress and we can go into more details.
Just 3 questions, what is “min_TOW / max_TOW”? And How I find them ?
About the take off weight, should I tune with the minimum weight or with the motor output around 1500 to 1600 PWM? Because we have a payload with 70Kg. What is best for tuning ?
min_TOW and max_TOW are the minimum and maximum Take Off Weight - something you physically measure (of course) and ATC_ACCEL* are the parameters you recalculate and set based on the take off weight.
Best to test, tune and especially Autotune (if you can get to do that) with the minimum possible take off weight and everything secured to avoid introducing unnecessary vibrations and movements. Then you adjust those ATC_ACCEL values last.
The problem with large heavy lift multirotors, often over powered for large payloads, you need to add some payload for tuning to keep it under control. Otherwise some would operate with motors at minimum and there would be no effective attitude control, possibly leading to ever-increasing altitude.
If you do need to add payload, then add enough to keep motors in some mid-range PWMs.
If you dont need payload, then great - you can end up with a better tune.
Nice! That’s a big one alright. Is that the weight condition it was in with the log you posted or did you have additional payload? Because for proper stability you would want higher thrust/weight than that log shows. Or is it possible the Li-ion cells can’t supply the required current?
I just read about sysid Flight Mode. We are a group of a bunch of ignorants trying to make a huge drone flight , So a ton of math can be really difficult for us now, we have reach amazing results in other drones (different sizes and motors type) just by guessing, trying and read a lot in forum.
The log that I post is the same payload that I show the pics, 70Kg of weight.
About batteries, we are using a P42A Cell (40A continuous current), we design a pack with 24s (100v) and 24 packs in parallel, in hover the current was 20A per pack ( 50% of Continuous Current of the cell), the voltage are dropping 10V ( stabilizing in 90v).
About the Prop, we are using a 62 Inch prop from T-motors, 24 pitch