I am really new to using flight controllers. I have been trying to figure out how to use my Mateksys H743-Wing V3 to control underwater thrusters in Mission Planner.
As of now, I’m not sure how to use Mission Planner to make the Mateksys control the thrusters. I know I need to make the flight controller send pwm signals to the thrusters, but how can I do that? Any suggestions is much appreciated.
You need ESC’s for the thrusters, the Flight Controller only outputs PWM control signals and can’t drive them directly. Pretty basic stuff here… The type of ESC you need depends on if they are brushed or brushless motors.
And, this is not a Mission Planner related question.
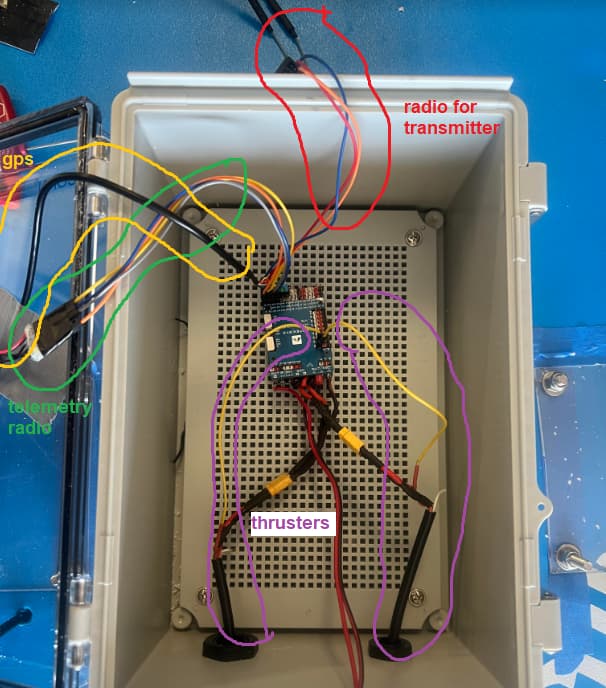
I’m not really sure how to program the Flight Controller to control the ESCs without using Mission Planner. I have it connected via telemetry radios at the moment. I thought since my Flight Controller is connected to Mission Planner, that will be the only way for me to program the flight controller to send PWM signals.
How do you go about programming the flight controller to send PWM signals?
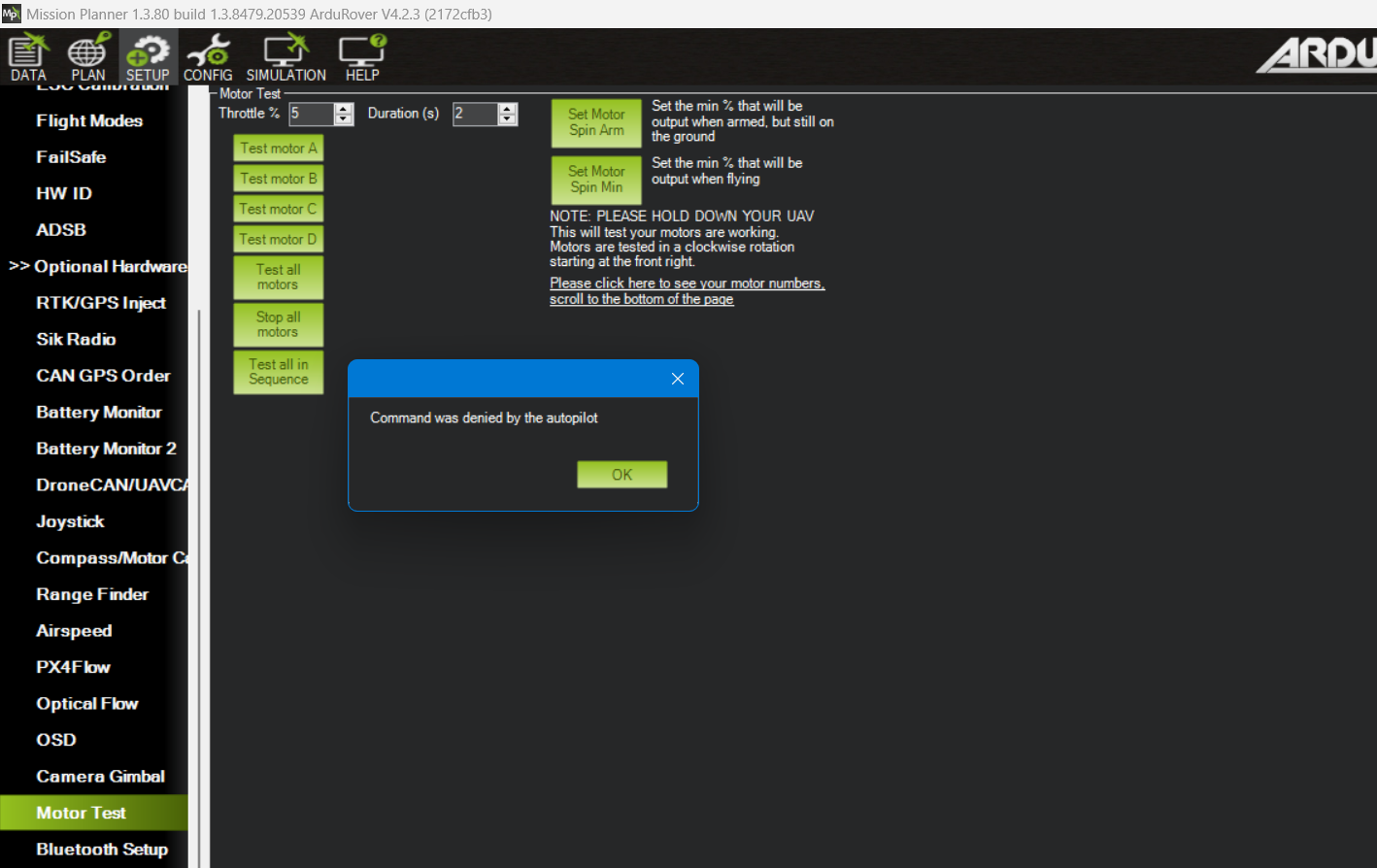
Some updates trying to step through motor and servo configuration
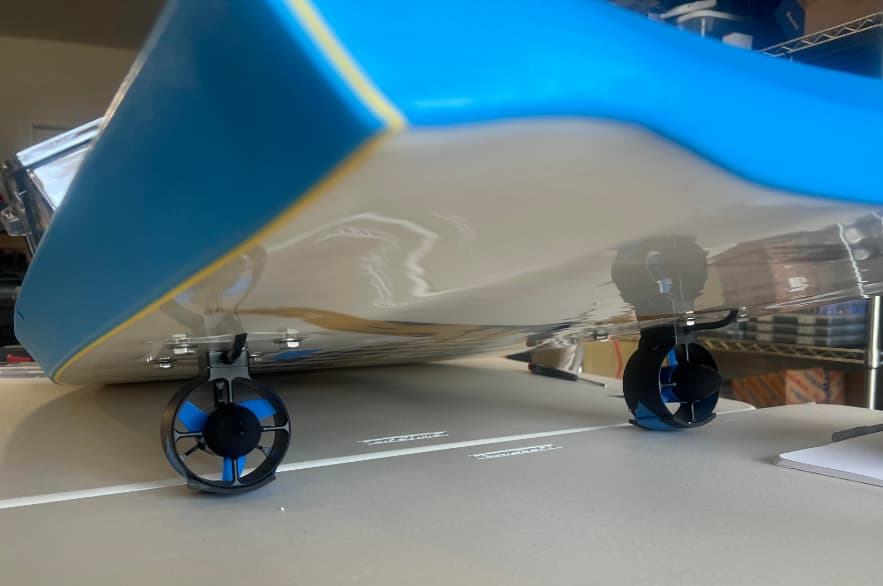
I am currently trying to run motor test to see if the thrusters can move via the mateksys. I have the thrusters connected to pwm pins 2 and 3 on the mateksys like this
Here are some questions regarding why this might not be working
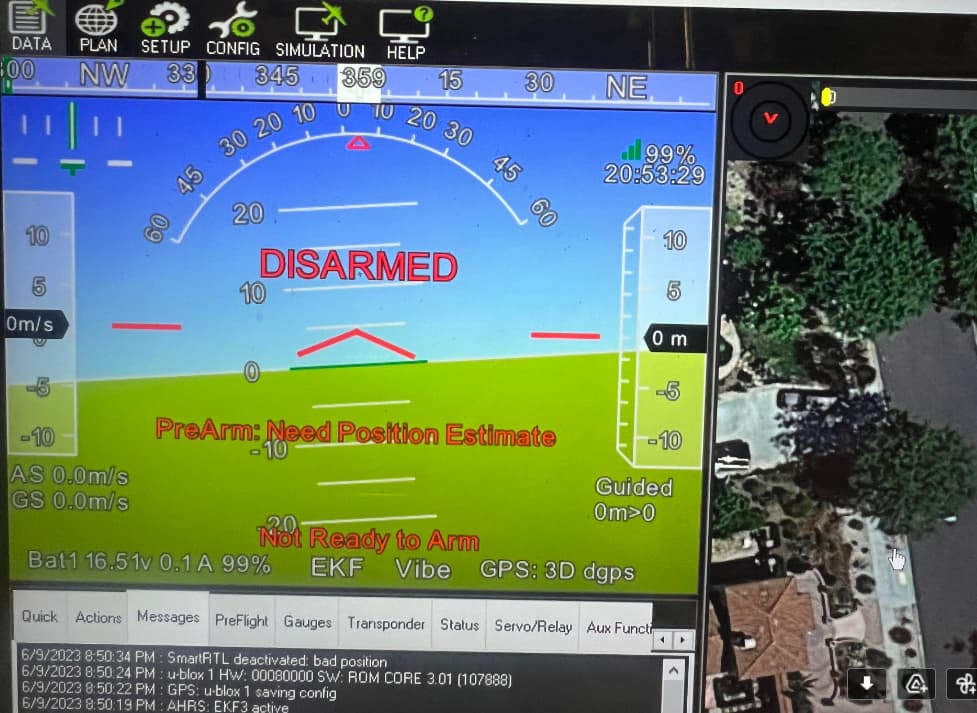
Is it because I am not arming the flight controller? When I try to arm, I must force arm. Maybe its due to logging issue (since it says logging failed)?
Is it because I don’t have position estimate, as shown below? I have been able to complete radio and accelerometer calibration but not the compass. Could that be why I don’t have position estimate?