I’m new to the world of ardupilot and also in this forum, as you can notice.
I will start by apologize if i’m posting this in the wrong category, but couldn’t find one that suited better.
I have implemented the serial protocol for the Robotis 1.0 servos but i’m now facing a problem and that’s why i have come to the forum, so someone could point me in the right direction and tell me what i’m doing wrong (since documentation for servos, in my opinion, are lacking information).
The problem is the following: using mission planner how can i give commands to servo1-servo4? I tried to change the servo channel name, thinking it would let me use the given servo channel (for example, renaming servo 8 to servo 1) but it isnt the case. If i use servo 8+ everything works just fine, but can’t find any info on how to use servo1 through servo4 in mission planner (it is set as relays).
There is so many option on 9 to 14 servo output after 1 to 8 servo , go to initial setup and choose servo output and set as you want , second thing is you can adjust reverse forward , servo function , min to max your output level
First of all, thanks for your answer. Second, sorry for all my edits in the question.
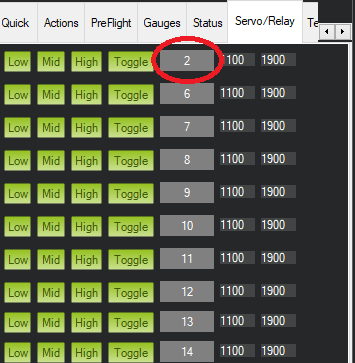
I think you misunderstood my question, in mission planner, Data window, under “Servo/Relay”, how can i test servo1 to servo4? This are set up to relay. Is there a way to change the channel of the servo you want to test? In the image, i wanted to test servo channel2, for example.
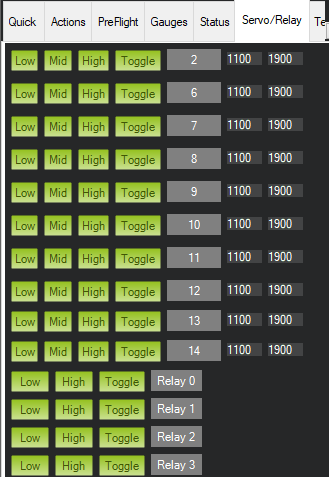
Running copter (custom firmware, based on copter 4.0.3) and the flight controller is pixhawk. The custom firmware is to run Robotis 1.0 protocol. To control the servos, the servo channel needs to be equal to the servo ID (based on tridge implementation of robotis 2.0 protocol Implement Robotis servo protocol by tridge · Pull Request #10058 · ArduPilot/ardupilot · GitHub), but in mission planner i can’t control directly (by that interface) the servo channel 1 to 4 (i guess those relays 0 to 3 are servo channels 1-4). I know i can change my servos ID, but mission planner must have a way to change the servo channels (use the servo channels 1 to 4), im just not able to find it (maybe i’m wrong).
That helps. So, there isn’t a way to control them by mission planner? How could i control them from my ground station (can do custom code - simple python interface, for example -, without any problem, just would like to have some points on where to start - maybe github commit for the other servo controls of the mission planner, which i think will not be easy to find my a person without insight knowledge)?