The lower the filter setting the lower the delay but also the lower the noise that will reach the controller. As long as your noise magnitude is less than 2.5m/s/s then your controller will initialise correctly.
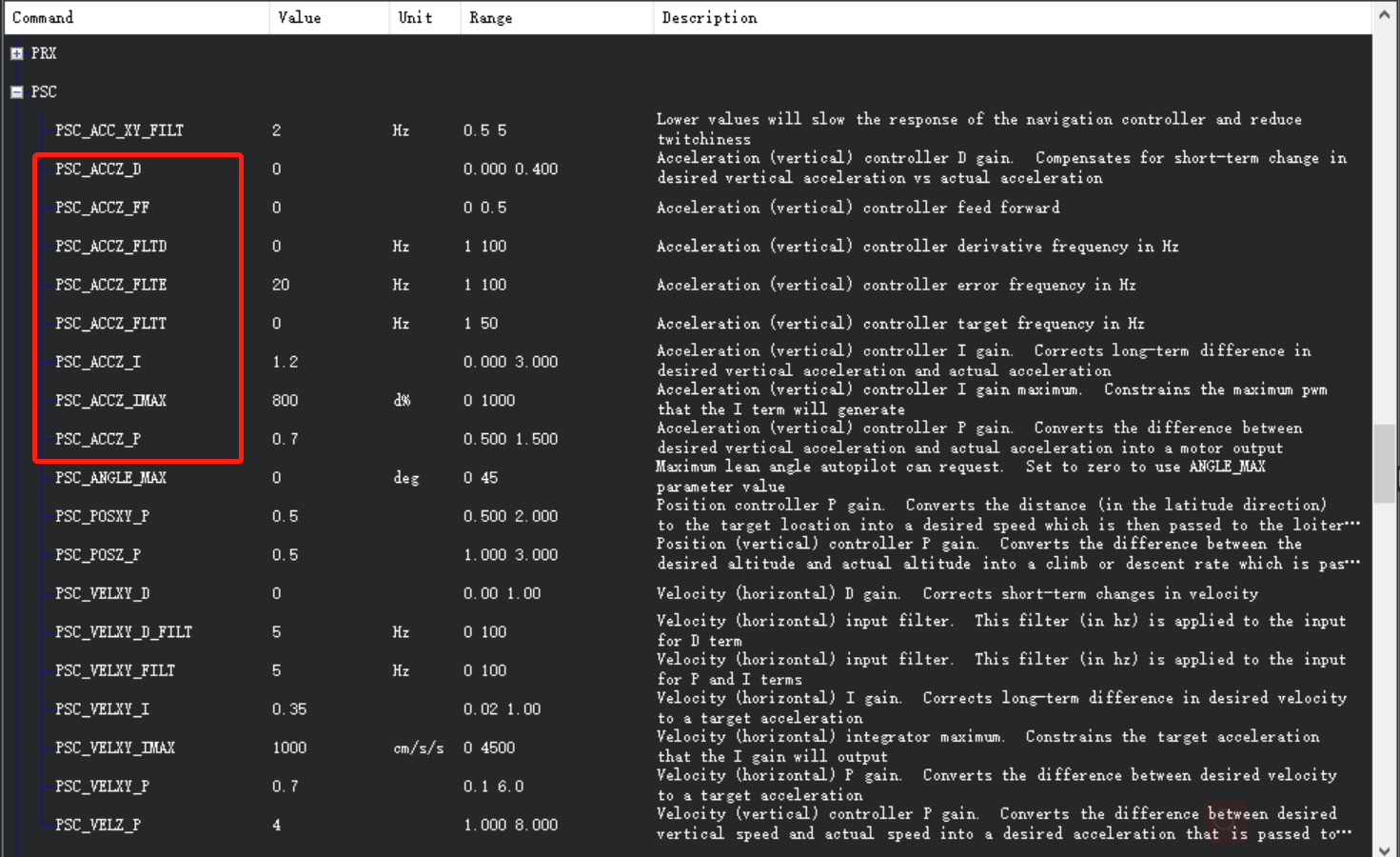
If it is too low you will see the aircraft oscillate up and down. To fix this you will need to reduce the PSC_ACCEL_Z parameters.
So make sure you are confident taking over in stabilize mode.
@bnsgeyer Hello, Bill. Copter-4.1.4 has been released. Are the amendments (Position controller init fix to avoid twitch on vehicles with high vibrations) referred to in it specific to the problem we are discussing here?
I copied the ReleaseNotes.
Copter-4.1.4 has been released as the official/stable version for multicopters and helicopters.
The changes vs 4.1.3 are in the ReleaseNotes and also copied below
Benewake CAN Lidar support
CAN GPS default lag dropped to 0.1 seconds (was 0.22 seconds)
Bug fixes
a) Compass custom orientation is never overwritten during calibration
b) EKF logging gaps fixed (some messages were occasionally being skipped)
c) Guided mode cornering improvements
d) IMU logging fix for IREG message (records IMU register changes)
e) LOITER_TO_ALT mission command’s climb rate fixed (could climb or descend too quickly)
f) Position controller init fix to avoid twitch on vehicles with high vibrations
g) Position controller init fix to better handle high speed entry to flight mode
h) Position controller prioritises reducing cross track error
i) Position controller relax fix
j) SBUS RC frame gap increased to better handle some new receivers
k) SERVOx_FUNCTION protection to avoid memory overwrite if set too high
l) SD card init triggering watchdog fixed
m) Spline path max lateral acceleration reduced (vehicle stays on path better but may be slower)
n) Takeoff bug fix if taking off below home or frame specified as MSL