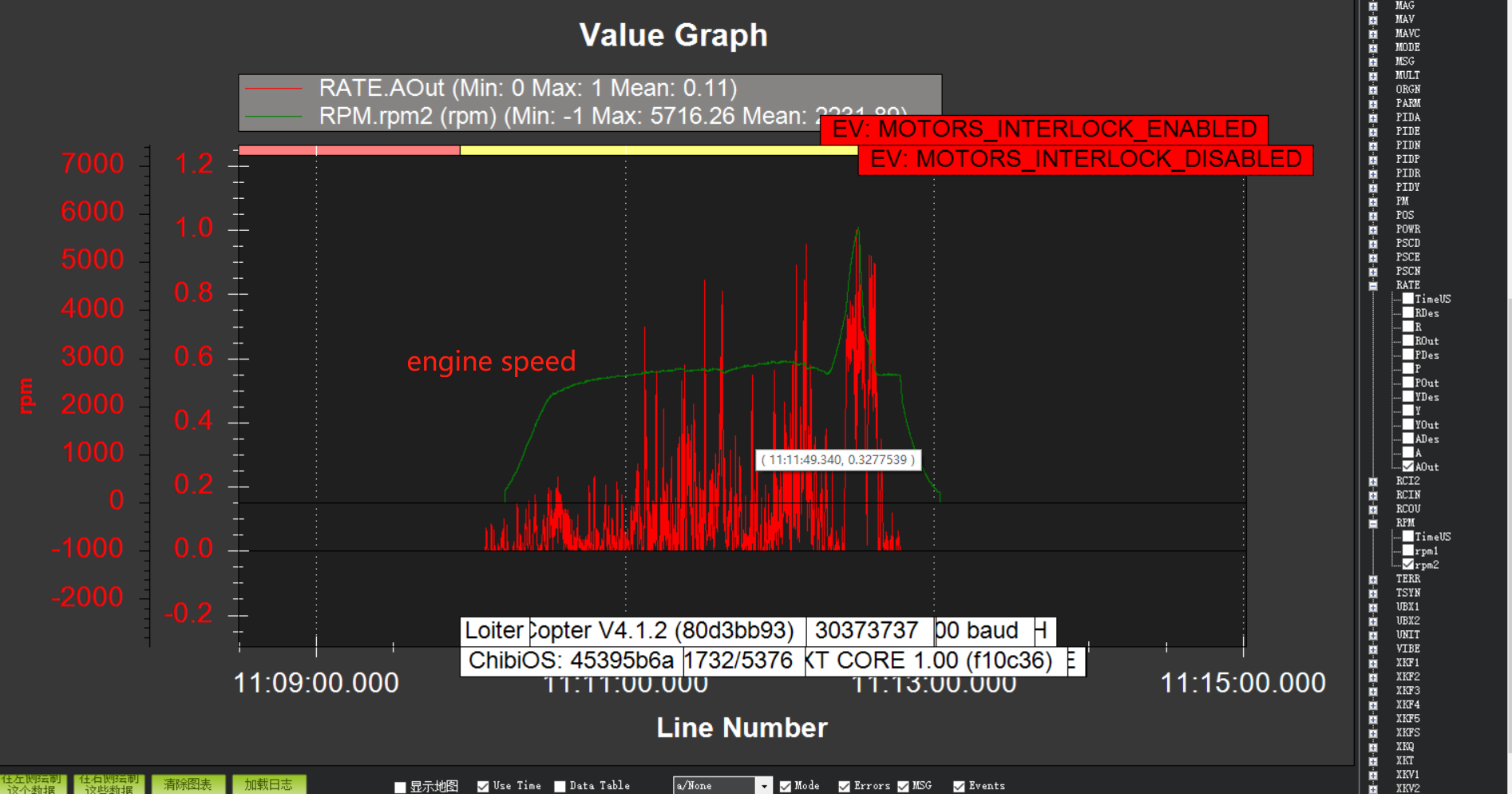
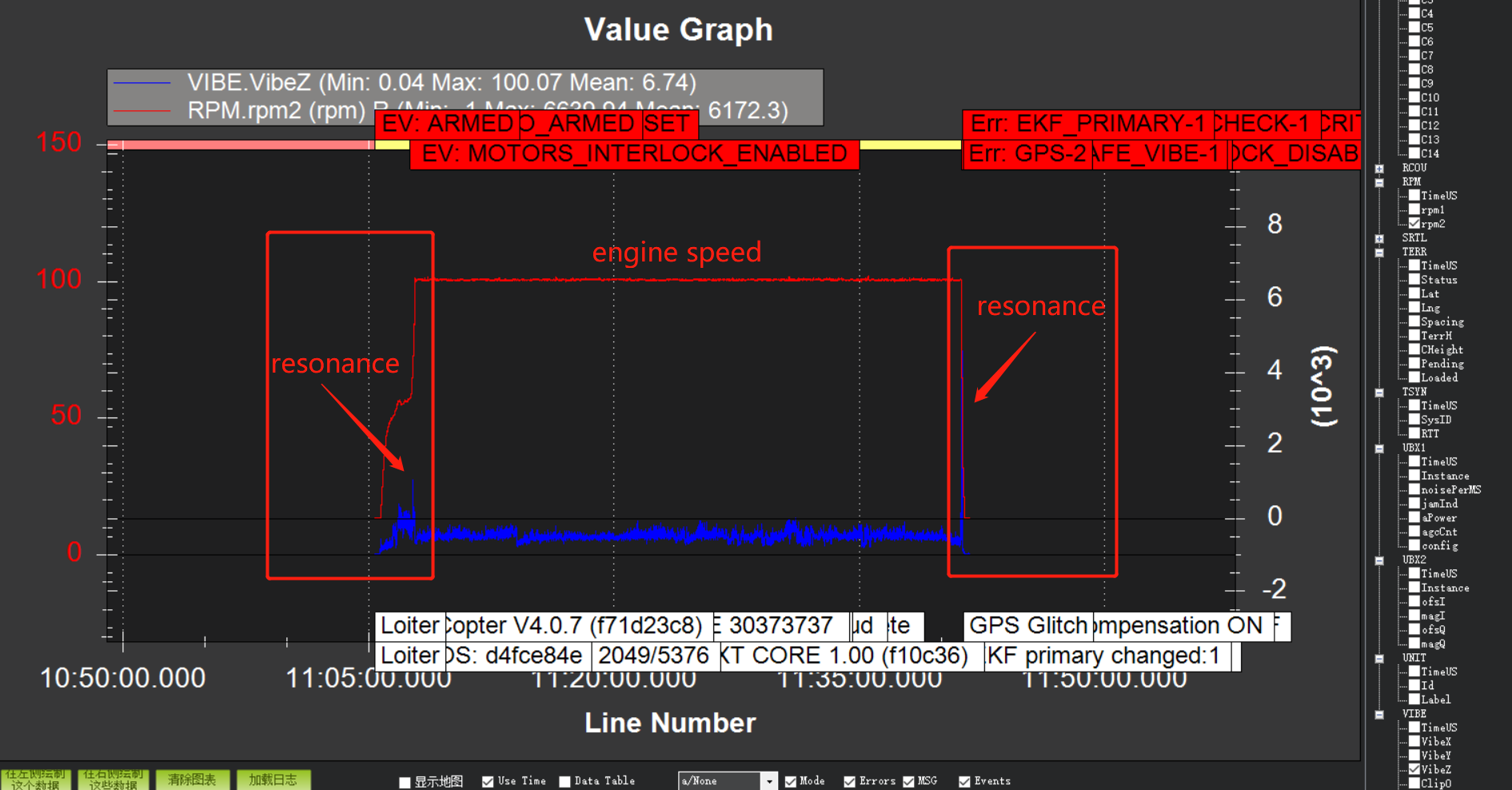
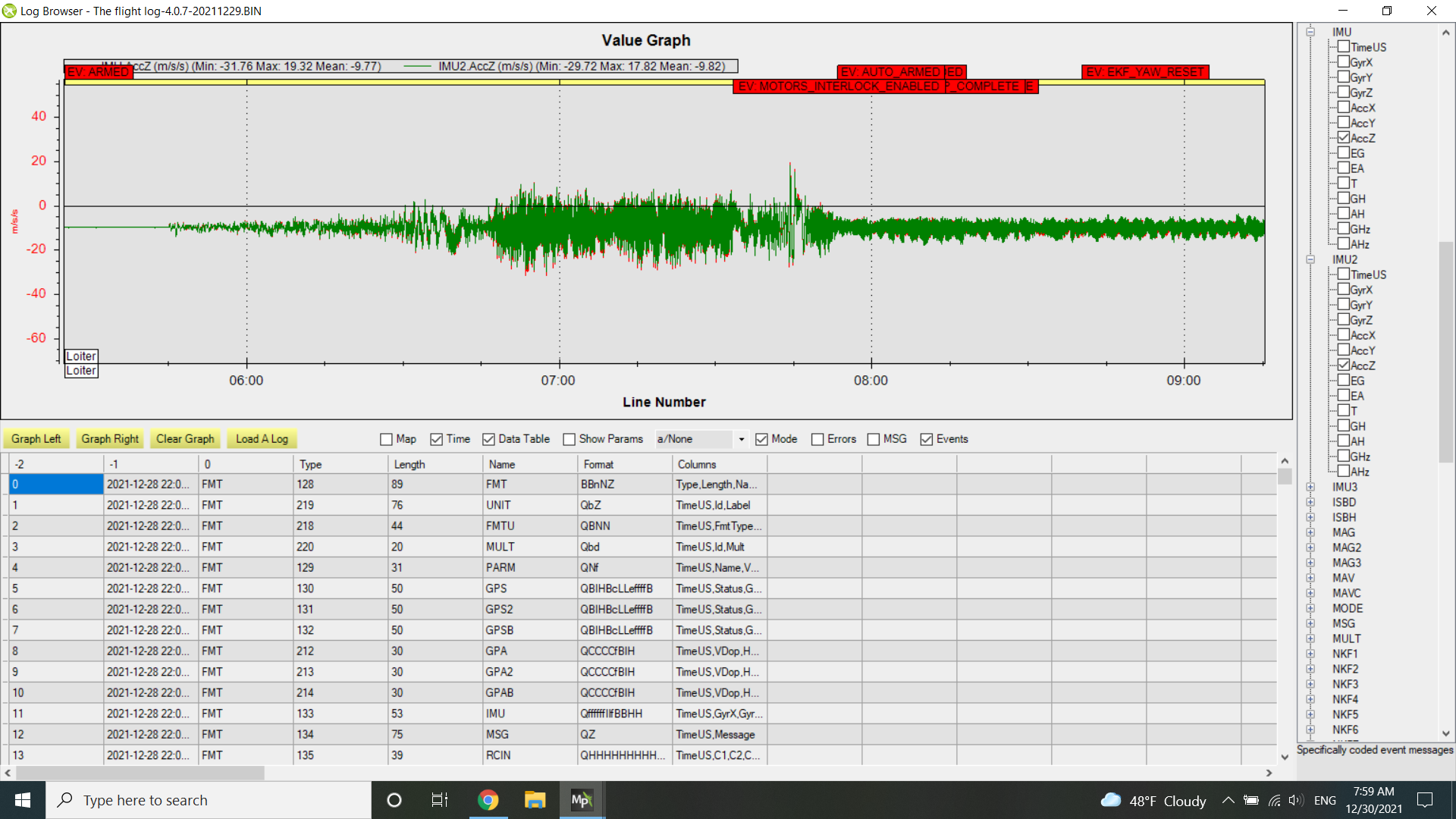
【How to turn off the cyclic blade pitch when the helicopter is on the ground】
When the helicopter is idling on the ground before takeoff or after landing, the PID control of the helicopter is on, resulting in the cyclic pitch controlling the helicopter. Especially when the engine accelerates or decelerates, resonance occurs, and the amount of cyclic pitch will be large, causing the UAV to roll over. Is it possible to turn off the helicopter’s cycle change or turn off its PID control when the helicopter is idling on the ground?
Ask for help!!!

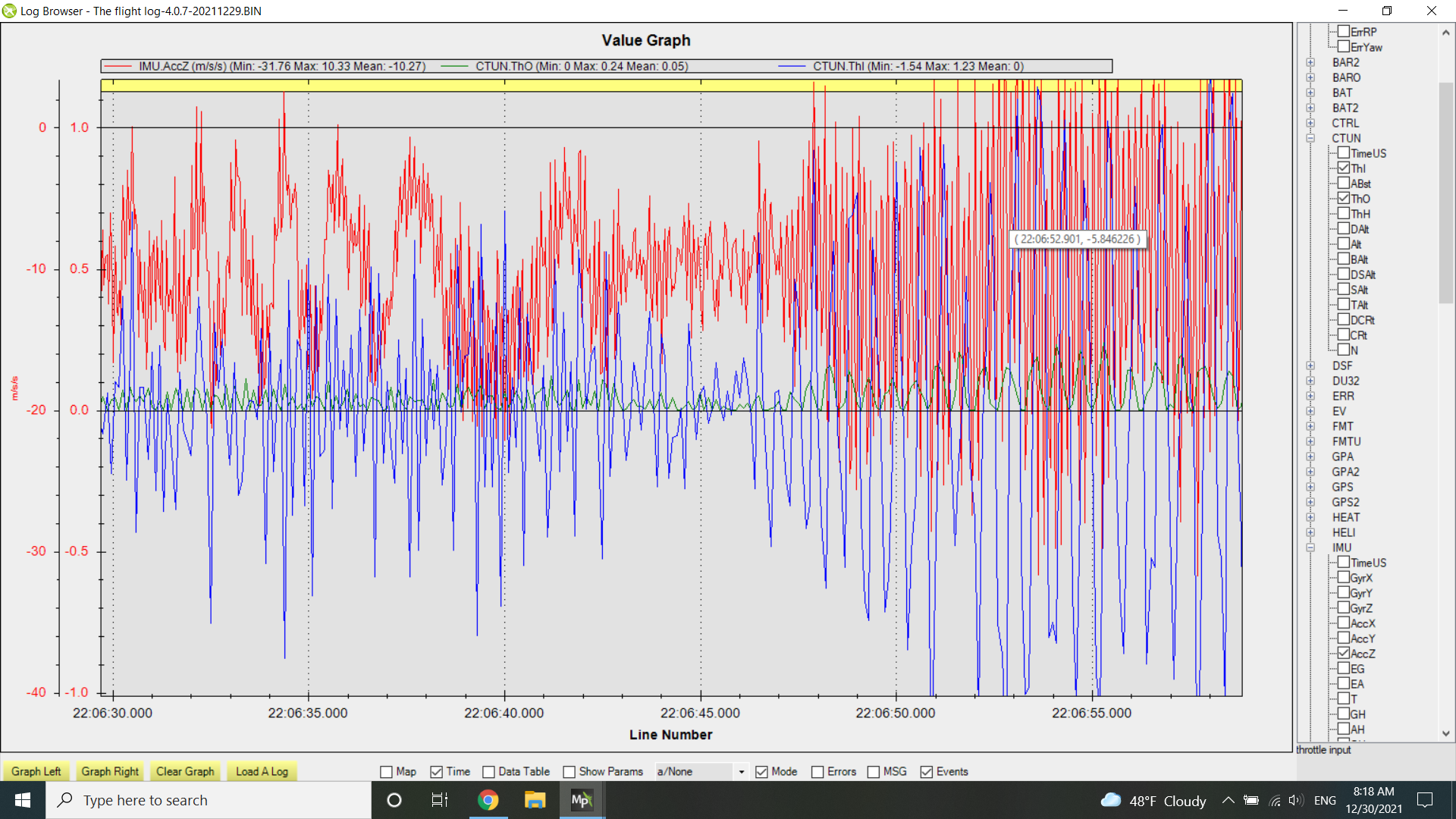
【How to turn off the collective pitch when the helicopter is on the ground】
When the helicopter is idling on the ground before takeoff or after landing, in the Loiter mode,the PID control of the helicopter’s collective pitch is on, resulting in the collective pitch controlling the helicopter. Especially when the engine accelerates or decelerates, resonance occurs, and the amount of collective pitch will be large, causing the UAV to up and down. It is very dangerous. Is it possible to turn off the helicopter’s collective pitch change or turn off its PID control when the helicopter is idling on the ground?
Ask for help!!!