Nice video and congrats! Thanks for the log and here’s some advice:
- reduce WP_SPEED from 2 to 0.3. I think the vehicle’s top speed is about 0.3 m/s so no point in asking for more
- In the log, CRUISE_THROTTLE=50 and CRUISE_SPEED=2. From the comments above it looks like you’ve fixed this in a subsequent test but in any case, I’d say the values should be CRUISE_THROTTLE=100, CRUISE_SPEED=0.3
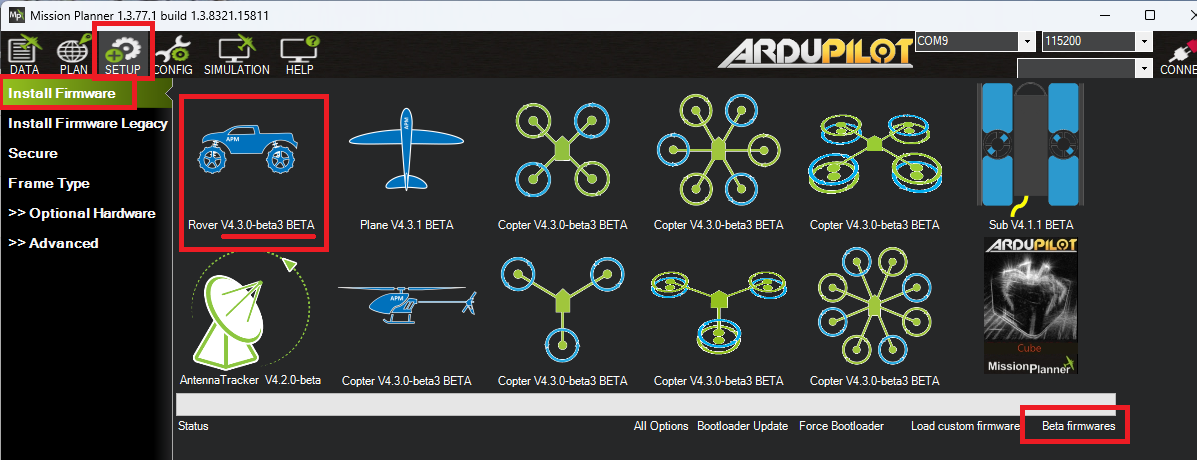
It looks like this vehicle is running “latest” (aka ArduRover V4.3.0-dev") from about a month ago . It’s no big deal but it might be a good idea to switch to the official beta.
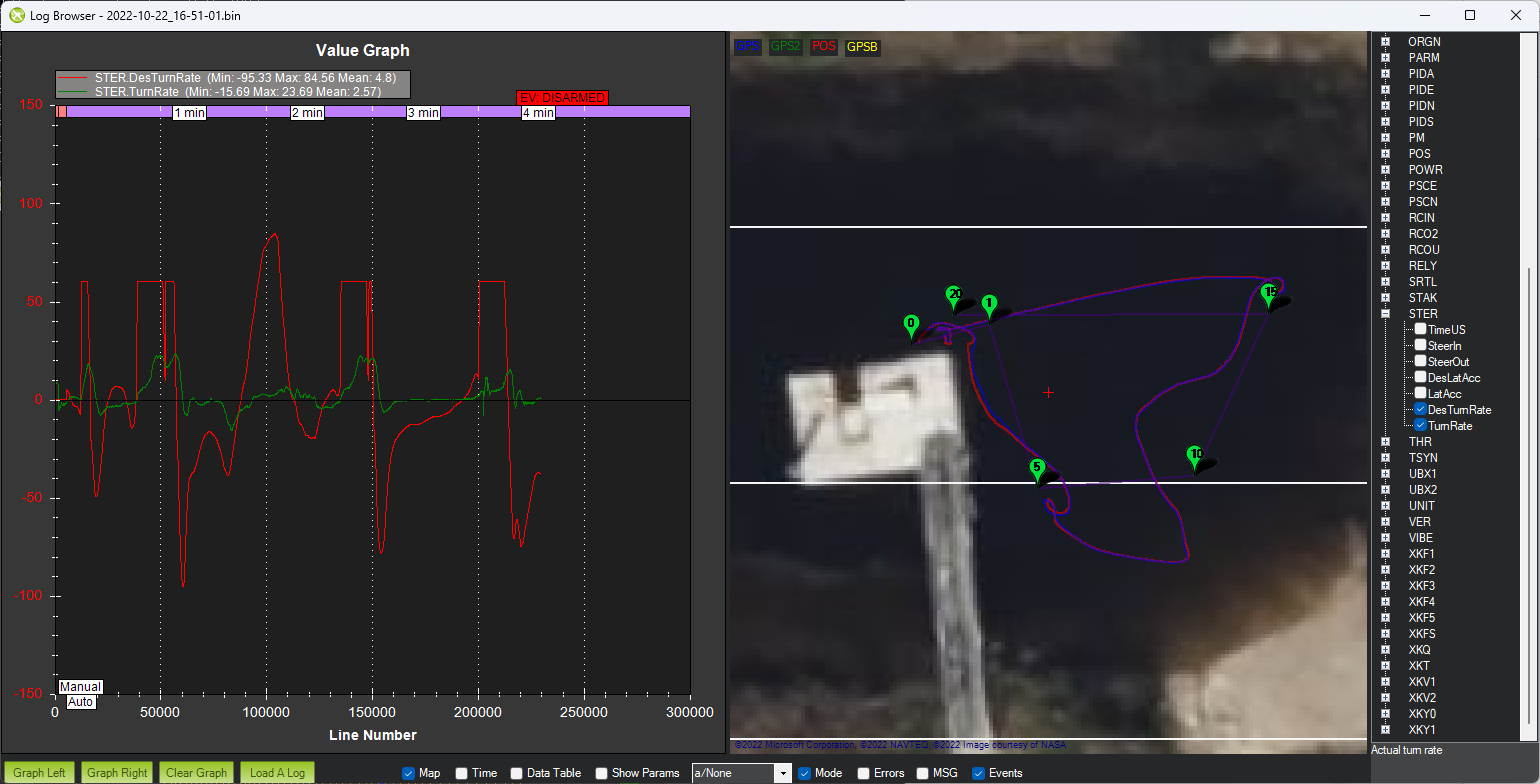
I suspect my suggestions above will make little noticeable difference to how it performs however… the core “problem” is that the vehicle is not following the auto mode plan very well and this is largely because the actual turn rate is not keeping up with the desired turn rate. It looks like the turn rate controller is using all defaults value so going through the turn rate controller tuning instructions would help.