I’m a software engineer and I want to start working with simulations. So I’m trying to follow this tutorial to set up MAVProxy with sim_vehicle.py on my Ubuntu 22.04 install.
As far as I understand I need to have two terminals open;
one to run sim_vehicle.py --map --console
and another one to run the mavproxy.py and insert the described commands in the mavproxy prompt
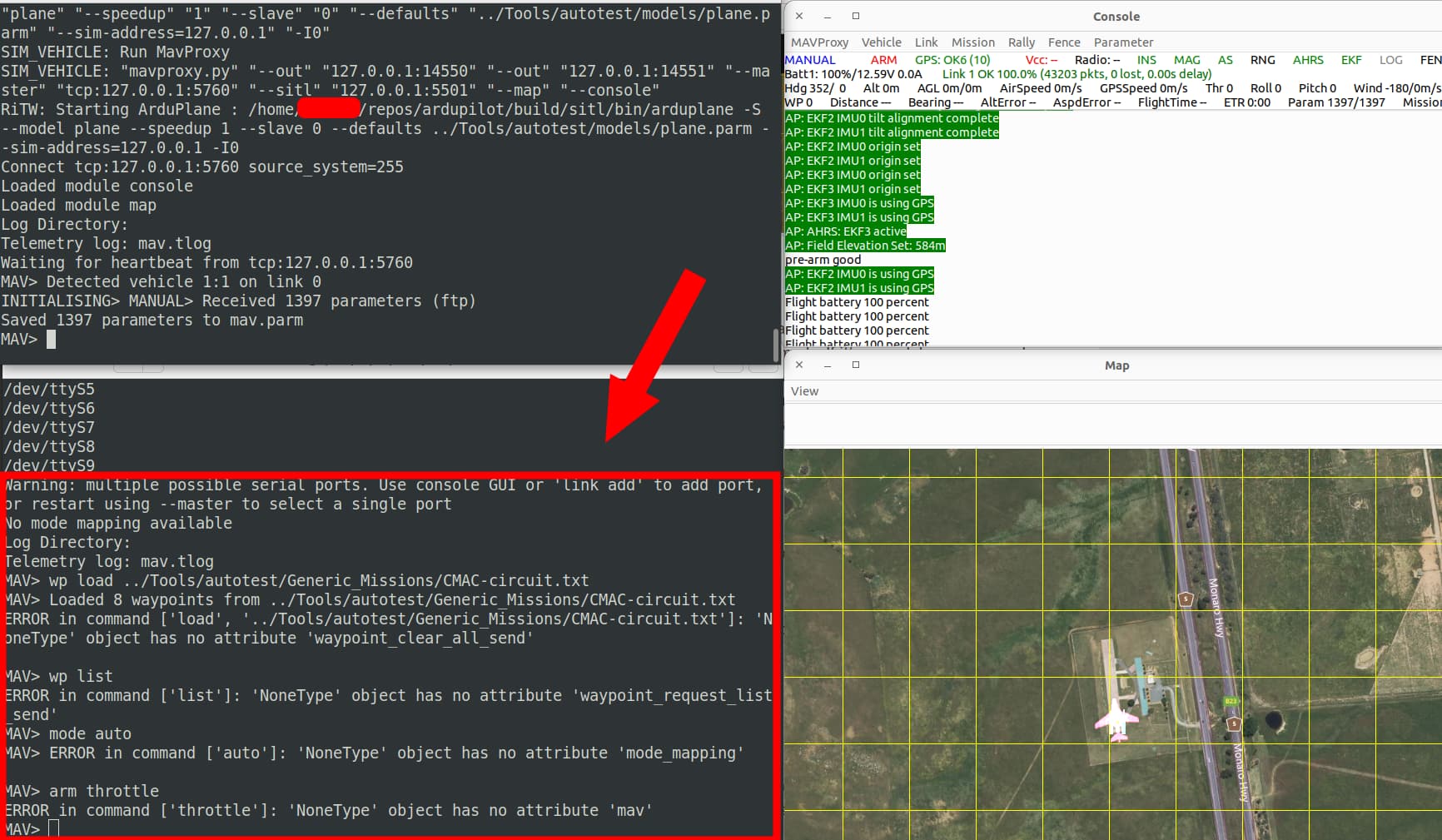
In the terminal in which I started mavlink.py I then tried running the commands described in the tutorial:
wp load ..\Tools\autotest\Generic_Missions\CMAC-circuit.txt
wp list
mode auto
arm throttle
run SITL with sim_vehicle.py launcher, and use the default configuration for my vehicle, sim_vehicle.py will launch mavproxy.py by default and connect it to SITL. The prompt you got on the terminal is mavproxy.py
load map plugin on mavproxy
load console plugin on mavproxy.
So you on your first picture, you got mavproxy.py launched by sim_vehicle.py. the --sitl you see is the default configuration loaded with sim_vehicle.py that allow to have a true RC simulation on SITL with Mavproxy and not using mavlink messages such as RC_OVERRIDE.
On your second terminal, your mavproxy instance launched but don’t have a master aka a main MAVLink device to speak with. That is why the second terminal show a failure.
Awesome, thanks @khancyr! Now I’ve got it working.
One more question. I see a lot of info in these windows, but I don’t see anything about the current setting of the actuators (rudder/elevator/ailerons). Do you know where I can see their current setting so I can see what the plane actually does to achieve the current flight path?