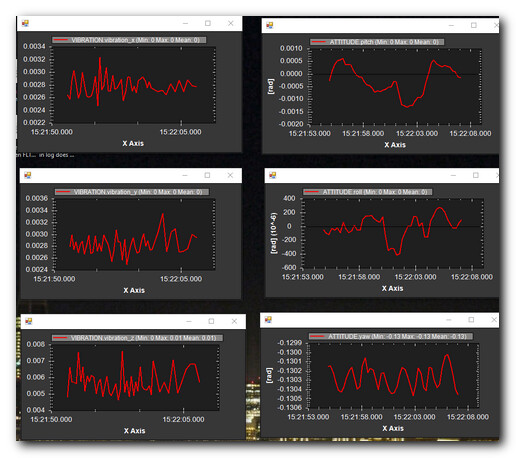
I would like to simulate the copter tuning process with ‘real drone’ values. As the default sim_vehicle runs flawless, I would like to inject motor and prop vibrations and possible frame oscillations, then step through the tuning procedures. I started by first monitoring vibration_x, y and z and pitch, roll and yaw with the Mission Planner MAVLink Inspector.
I then put the copter into the air and made changes via mavproxy -
param set SIM_VIB_FREQ_X 250
or
param set SIM_VIB_MOT_MAX 250
but no changes to the graphs were observed.
What is proper way to do this?
As a side note, although listed in mavproxy, these parameters are not listed in the 'Complete Parameters List’.
You will really save yourself a boatload of time if you get to grips with this. A lot of the tests just set parameters and then check results. There is even an autotuning test
Looking autotest over I see the overall (long) test and subtests, but I wanted to graph the change in real-time using the mavproxy graph module (eg, ATTITUDE.pitch). So still unclear if or how these parameters can be used in the sim_vehicle.
SIM_VIB_MOT_HMNC
SIM_VIB_MOT_MASK
SIM_VIB_MOT_MAX
SIM_VIB_MOT_MULT
SIM_VIB_FREQ_X
SIM_VIB_FREQ_Y
SIM_VIB_FREQ_Z
Andy, I tried launching a sim_vehicle, then used graph ATTITUDE.pitch in real-time with the graph module. I then tried changing some of the above parameters, but no change to the graph.
Note when I changed the WIND parameter there was a response in the graph, as expected.
What I am trying to do is once I get a simulated vibration as shown in the graph, I will then invoke notch filtering to simulate tuning.
Also as noted in the beginning, I connected the sim vehicle to MP and tried to graph with MAVLink Inspector, but also no response.
It seems either I am not doing this correctly, or the functionally has been removed despite it still being listed.