I’m trying to set up rtk to run on rover. My gps module on the rover is Here3 M8P
My base module is Unicore UM980. When I connect on Mission planner, I display it as rtk Float, but it does not switch to rtk fix mode. rtk remains float and rover is constantly navigating the map. I’m using 3DR/SIK 433MHz telemetry.
You can’t just switch it to RTK Fixed. Fix quality is a function of signal quality/stability on both sides. The M8P isn’t always a great choice when you want to maintain an RTK Fixed solution, in my experience. An F9 or M10 variant may produce better results.
It is easier to test with the u-blox utility alone.
For example, on ideal conditions, I could test two GPS’s together at the time. With both on RTK Fixed the reported coordinates difference was the same as their physical separation (both oriented NS and EW).
I noticed something. the firmware used by the m8p gps module I use is not for rover. m8p also has a firmware made for rover, but I couldn’t find how to install it. i tried it via ublox centre but it didn’t work. could it be related to this that rtk does not go to fix?
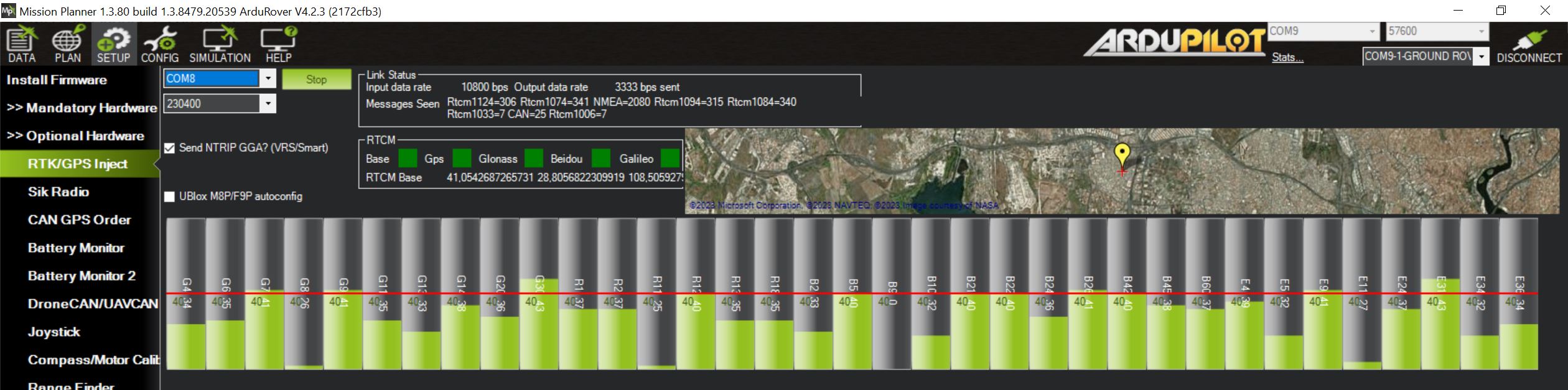
I can also find quite a lot of satellites with the um980 I use as a base module.
You will need to use the legacy firmware update mode. the m8p isn’t a very good RTK GPS receiver, realistically float is about as good as it gets, it can do RTK fix but its intermittent at best even under ideal conditions. I spent months trying to get a set of these working when they were first released as they were selling them with the new pixhawk 2 cube that also just came out. I tried everything to get RTK fix but failed and the manufacturer failed to mention that slight issue that it would never get a stable RTK fix so was essentially useless for professional RTK use.
these are much better receviers, they are a fraction of the price and dual band so work as good as a f9p.