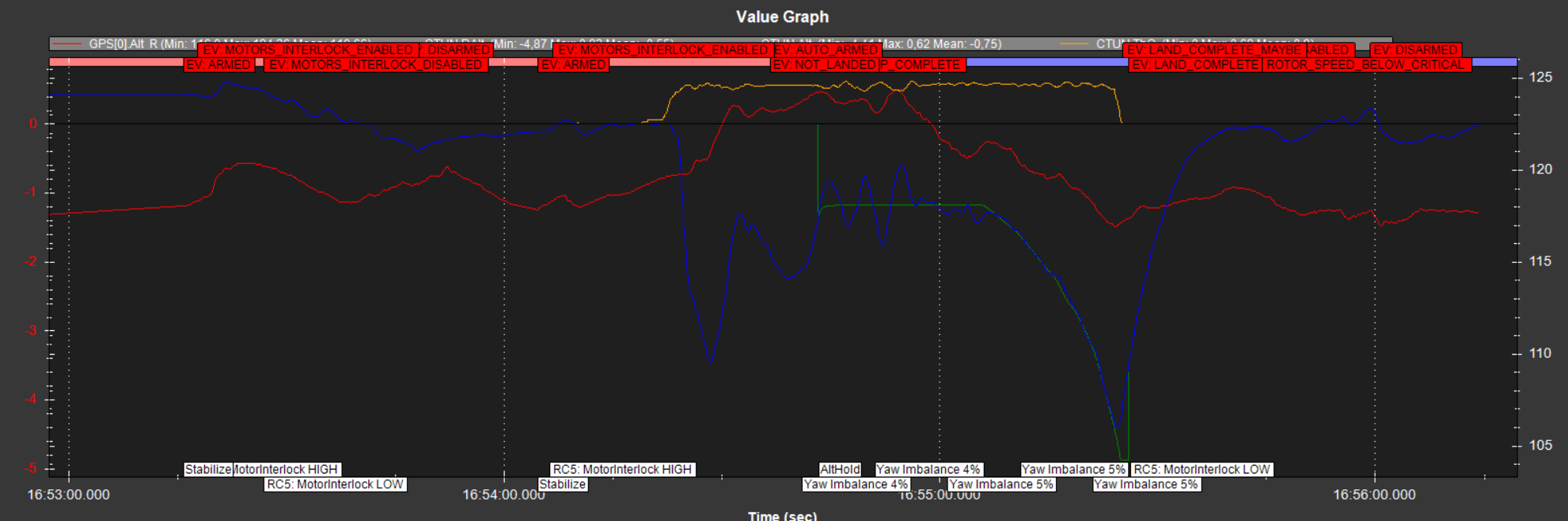
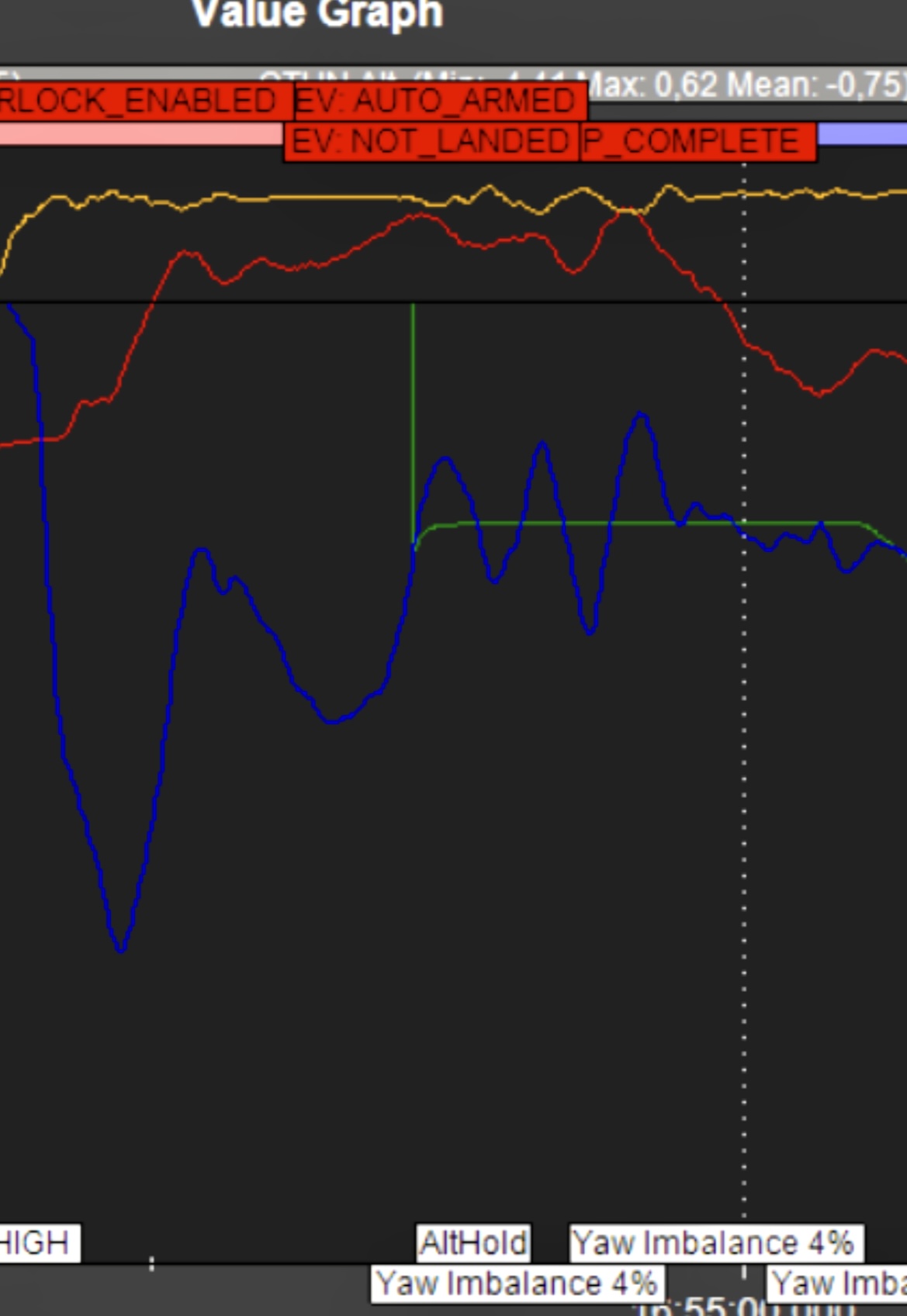
Following this i set the h_option to zero and when I landed in alt mode i pushed the throttle down to land when landed i don’t released immediately the throttle stick to middle and the collective gone to min collective pitch entering the rotor in reonance, I immediately cutted the interlock and the heli don’t broke….
What’s H_LAND_COL_MIN set at?
Normally set this parameter low enough to keep the heli firmly sitting on the skids, but having it set too low can cause troubles. I set this at -2° for symm blades and -3° for asymm blades.
A log where this occurred would help though.