For a Transition from e.g. QHOVER to FBWA some Params are effectiv such as:
Q_TILT_MAX, Q_TRANSITION_MS, Q_TILT_RATE_UP, Q_TILT_RATE_DN…
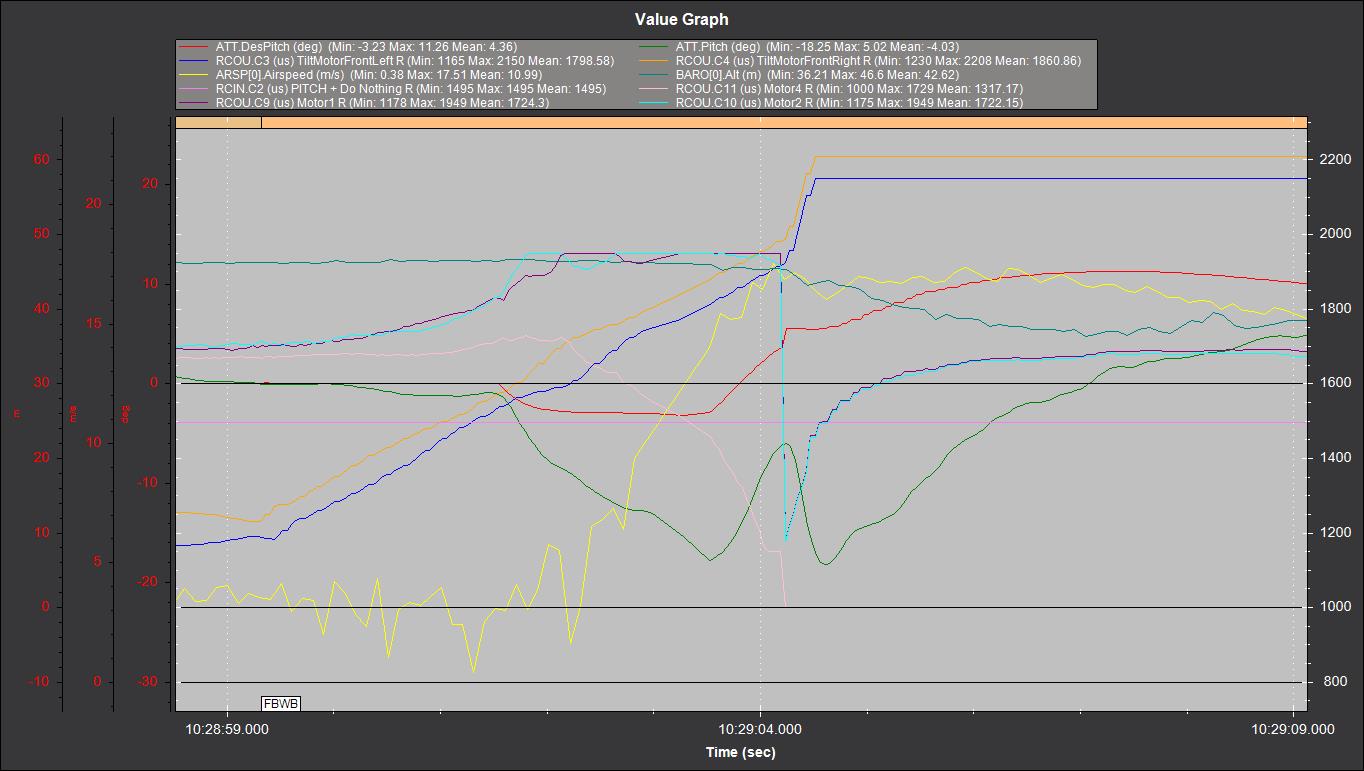
Starting with FBWA DesPitch goes down, Pitch even more and at the phase where the Tiltunits goes
finaly down the Att_Pitch goews even more until -.25°. And so the altitude looses 10 m.
ATT.Pitch goes down, but ATT.DesPitch not really. I therefore suspect an aerodynamic cause rather than a firmware error.
I just looked again in my old logfiles of the two Tri-Tilts (Mozart 1 and 2). One also pulled down a bit, but the other pulled up a bit.
I don’t see this behavior with the quad VTOLs.
Could it therefore have something to do with a motor pitched too far down in the final position ?
Did you ever suddenly give full throttle in level flight (FBWA) ? Possible errors by a too far down aligned engine should be recognizable in the log file.
Do you also have the problem if you perform the outbound-transition to FBWA instead to FBWB ?
I do not have a patent solution or even the cause. I suspect there are several causes.
Hello Rolf, I’m happy to hear from you. And thank you for the congratulation.
As you know. I was a follower of you long ago.
At first I made a Tailsitter on the base of the Skywalker 6.
Second it was modified to follow Mozart as Tri Tilt.
Then changed back to Tailsitter because of angry right turn during Transition an no support from
the devs.
During the Tuning of a bad QLoiter the BEC died and following the Skywalker in a full speed vertical
Landing between shugar beets.
Know I rebuilt the Tri Tilt with a spare part fuselage. May be because I can’t lose.
And again, it makes fun, exept the transition. The Log of the master project (Mozart) was already analysed to learn about the Params.
After your recommendation, I checked the Tilt angles.
For QHOVER they have the same level as the back Prop.
And tilt down 90° for FBWA,B. Then the axels are paralle to the Pitch Zero.
May be, this is to low because in Fligth Direction and not in Cord Direction.
In a Log of Mozart from Mai 2019 I red a Q_TILT_MAX of 75° and a Q_TILT_RATE_DN of 10 °/s
Where this your favorite values?
FBWA not checked yet.
Pitch Stick was in middle Position during transition.
Here the graph of Pitch, Tilts, Speed and Mots.
Q_TRANSITION_MS = 1000 (1s) less Pitch Down as when = 1.

")
")
")
")