Hi! I have a problem, I designed a set of IMUs: ICM20602, ICM20689, MMC5983. When setting the Hwdef.dat file, I don’t understand the principle of setting the rotation direction. Do you have any friends who know? Hope to get your recovery ! Thanks!
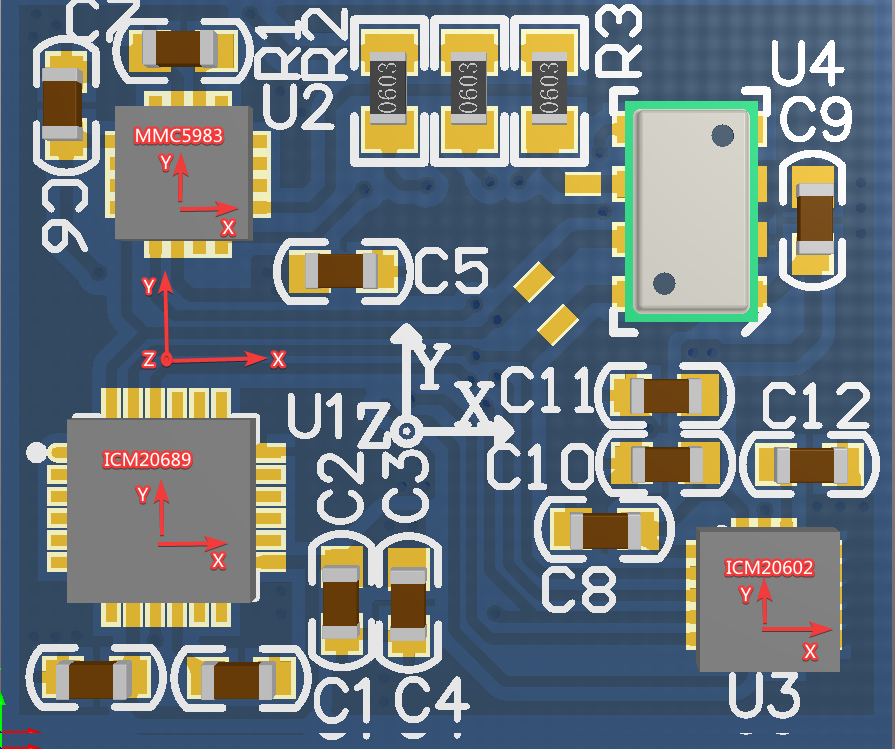
The IMU facing down .The circuit board diagram is shown in the following figure.
thank you! The main reason is that I don’t understand the principle behind the rotation. I don’t understand it with reference to pixhawk hardware(MPU6000、L3GD20). I wonder if the principle of rotation behind this is related to the coordinate reference of the gyroscope
This depends on the board. For example, MATEK H743 has an arrow on its back so this is why it’s common to mount it upside down to see the arrow on the board and it is pointing front.
AFAIK, X-axis is front and Y-axis is sideways.