I cannot read logs well, and I have a quad with problems.
Starting with reading logs. I have gone through the available instructional material I can find
(this for example https://ardupilot.org/copter/docs/common-downloading-and-analyzing-data-logs-in-mission-planner.html#common-downloading-and-analyzing-data-logs-in-mission-planner-downloading-logs-via-mavlink)
(please suggest more, hopefully there’s something I haven’t seen yet)
but it just isn’t getting me over the hump. I can pull up a log, I can find the particular data that might be relevant, but it still doesn’t mean anything to me. The error messages sit on top of each other so I can’t read them, and when I try to zoom in I just lose it all. I just can’t manipulate the viewer GUI properly. Don’t get me wrong, it’s awesome that a viewer GUI is built in to MP, but still it’s pretty clunky and I just can’t figure out how to “drive it”. I would love to be a master like those of you who can read off the entire flight history of the drone from the logs, but I don’t know how to get there. Staring at more logs isn’t going to do it, at least not the way I’ve been staring at them, because I’m not picking up anything at all yet. Is there a standard procedure you guys have evolved, looking at particular data first to get an overview, things like that?
Here are some specific current “real-life”  problems:
problems:
-AP V4.1.0-dev, MP 1.3.74
-
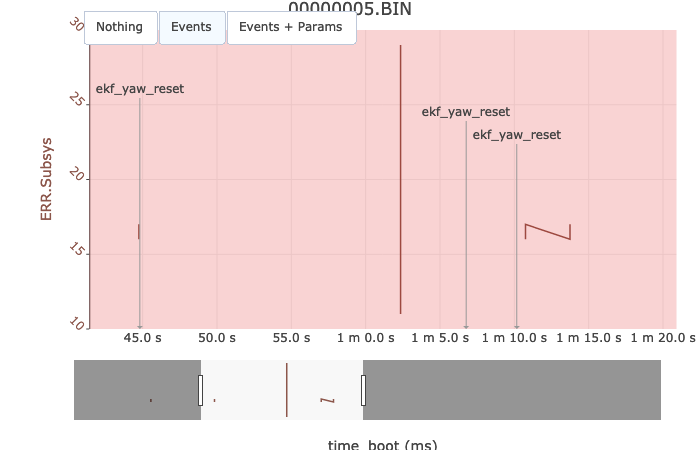
I’m linking to a .bin log of a short test flight.
.bin log -
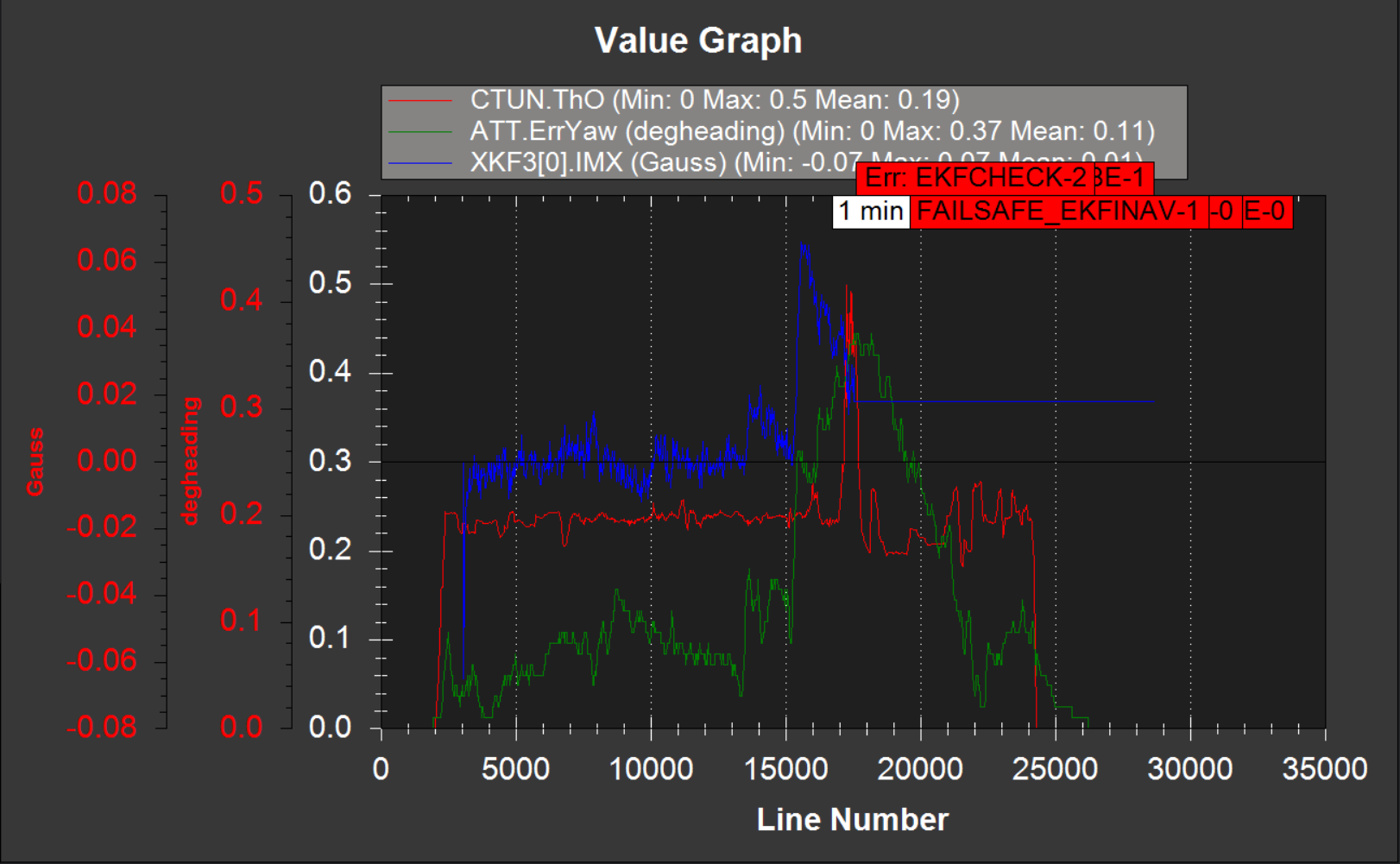
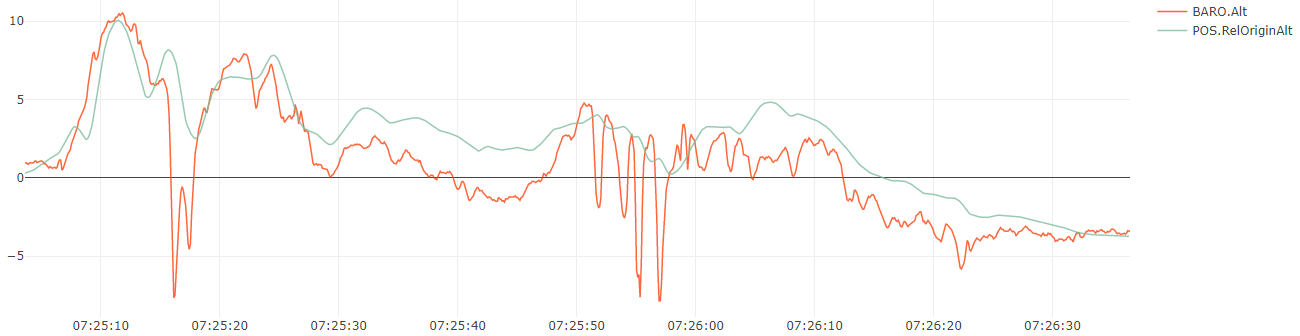
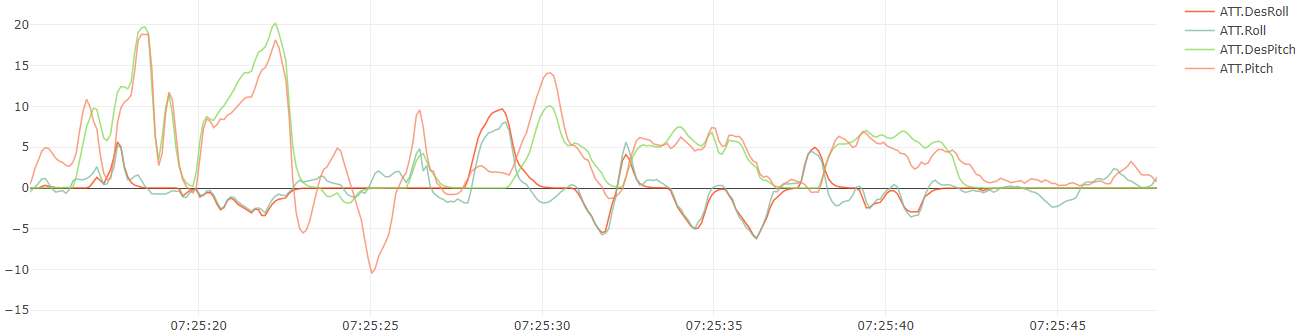
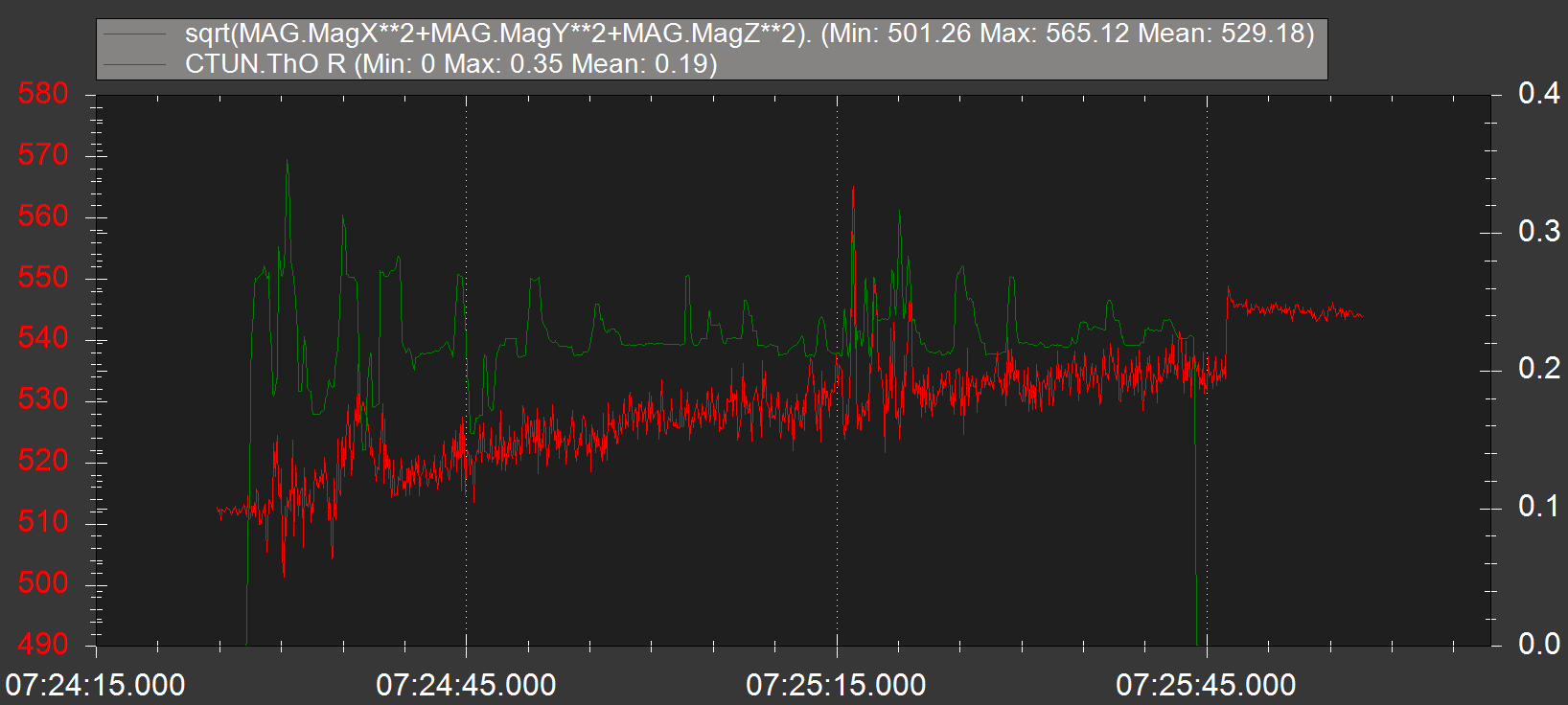
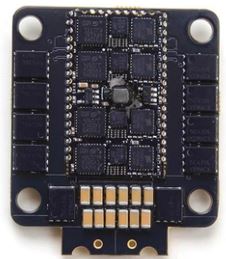
This is a 7" FPV quad, with a cheap BN880 GPS/compass module on a short “tail” extension to push it away from the rest of the electronics. I had this setup working fine (e.g. this frame was flying with this FC and this cheap GPS/compass without errors), then I changed the motors, moved components around, changed battery, added LED lighting. I recalibrated the gyro and compass (a few times) but I can’t get it back into flyable shape. In my telemetry I see “bad gyro health” and “EKF variance” and “GPS glitch” and “compass… can’t remember what that one was.” But to me this sounds like either too much vibration or compass/GPS interference. Or both. So before I go changing things without knowing the problem, perhaps we could diagnose using the logs?
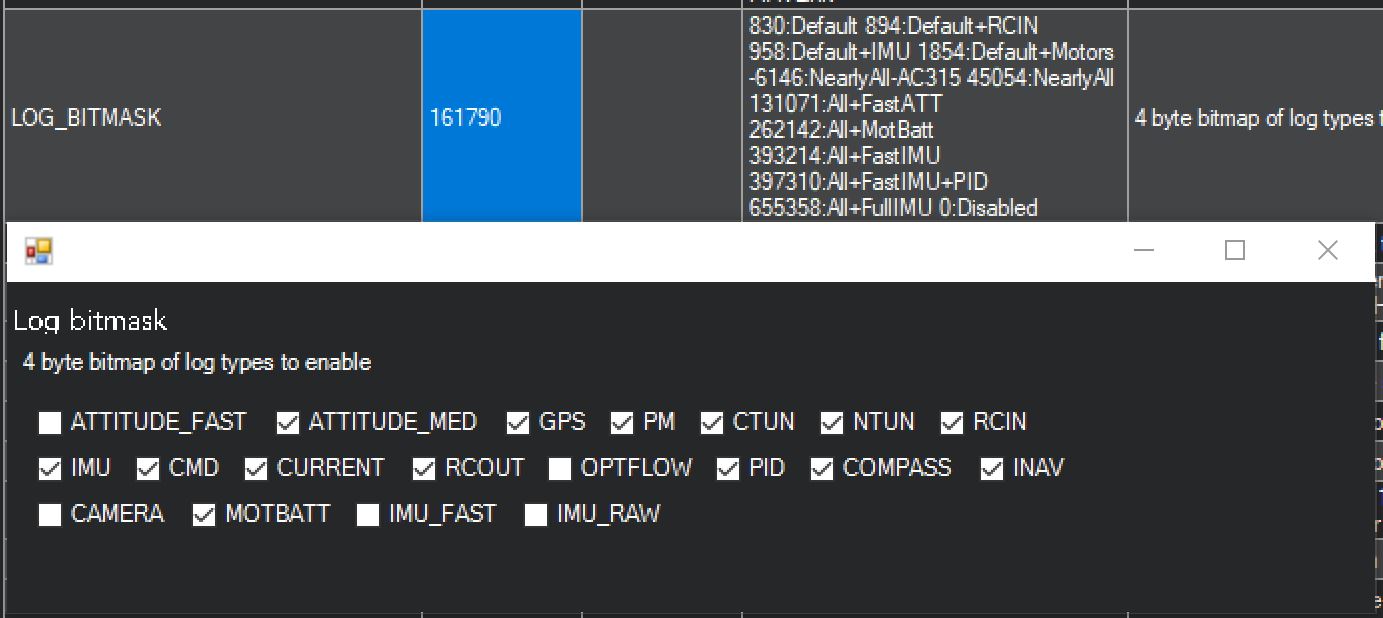
-I can’t find VIBE in my log. Am I blind? I may be. I have my logging bitmask set to 830 for default. Does the default logging not include VIBE? It doesn’t say anything about that here:
https://ardupilot.org/copter/docs/common-measuring-vibration.html
so I’m assuming that vibe should be in the default log info…
-I attempted to convert the .bin to a .log so that I could open it in different graphing software. However, upon clicking “convert .Bin to .Log” and choosing my .bin, I get no response. Did it do something? If so, where did it put the .Log? I went digging around for it and I can’t find it. So I’m not sure how to extract a binary into ascii that I can suck into different viewing software (with which I am more comfortable perhaps).
So, suggestions regarding the incomplete log I have, and where to go from here?
much thanks,
Matt