In bench testing I’ve noted that I can arm and commence flight in Stabilise mode even though my GPS doesn’t have a solid fix. I’d like to be able to prevent that, so is there a parameter that will do the job? AHRS_GPS_MINSATS is set to 6, but this doesn’t prevent arming and spool-up when flying in stabilise mode.
Yes, activate and configure the fence. That will prevent arming until GNSS has a solid fix.
Thanks amilcarlucas, I think I’ve got it: If I set a fence (any fence) my copter won’t arm until it gets good GPS?
So for my situation where I don’t necessarily want to restrict my flying area, I can simply set a height fence higher than my normal flying height and higher than my RTL height parameter.
yes, that is how it works.
I’ve just finished setting up a fence on my TRex 500 heli. What’s not clear to me is, if my heli crosses the fence while in Stabilise mode, and triggers RTL (or land), can I take control again once the heli is back within the fence, before it gets back to the launch point?
The wiki says, “If you really want to override the fence, you should be ready to switch the flight mode twice …”. Does that mean that if I switch to POS HLD and back to STAB a couple of times it will cancel the RTL fence action and give me manual control?
Yes, that is what it means.
But you should test it anyways
After it’s in RTL I think it behaves like any other RTL circumstance whether Fence is active or not. Switch out to another mode, any mode, and fly it.
1 Like
Thank you amilcarlucas for the confirmation.
Dave, I understand I can switch in and out of RTL mode manually, but I was concerned that it might behave differently if RLT has been triggered by Arducopter while my Tx switch is in a different mode, such as Stabilise. As suggested above, I’ll try it next time I’m at the flying field.
Doesn’t matter. It’s change in mode that is detected and then switched to the new mode selected.
1 Like
Ok, understood. Thank you Dave.
We have a problem!
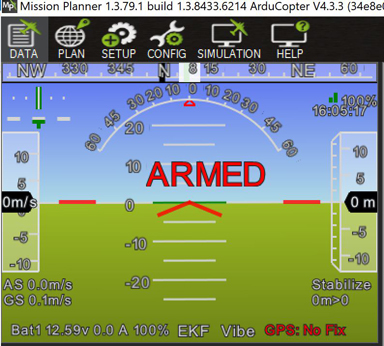
Testing my TRex 550 today after putting it back into its scale fuselage I found I was able to arm and start the motor even though MP was reporting that I had no satellites.
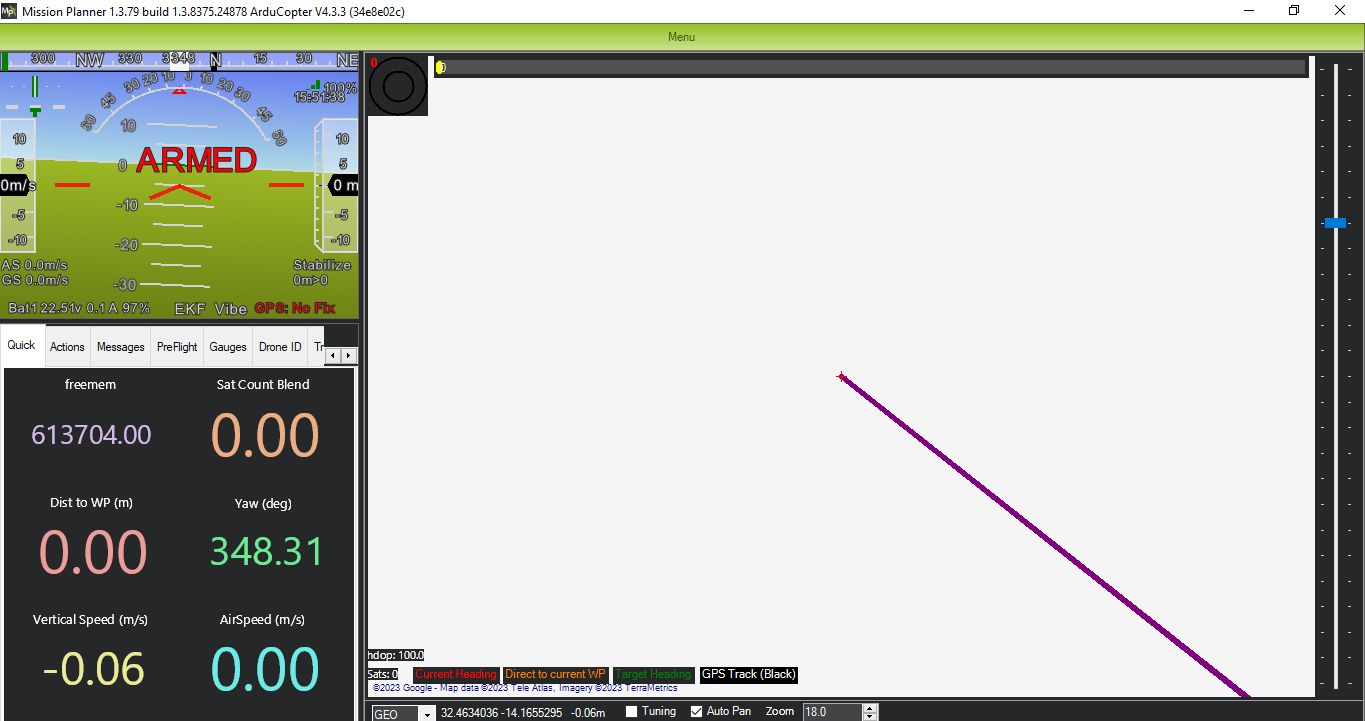
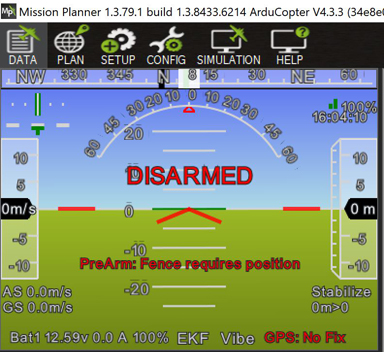
I’ve enabled an altitude-only fence, with ‘Report only’ as its action. Isn’t that supposed to prevent me from arming, or do I need to configure one of the other actions to prevent arming without a GPS fix? Attached is the paramater file from today’s tests.
JetRanger testing.param (21.0 KB)
Set FENCE_TYPE,3 for Alt and radius
and FENCE_RADIUS,600 or 1200 or whatever local laws or eyesight will allow
I’m familiar with the different FENCE_TYPEs, but I understood that by setting any type of fence it would prevent me from arming if I don’t have a GPS fix. I want this because when my GPS is in a scale fuselage I can’t see if it’s ‘fix’ light is flashing, and I’d rather not start a flight until it is.
Think you need a circle fence type for a positional error to limit Arming. What Shawn is suggesting. An altitude fence only won’t do it.
Fence Type 1
Fence Type 3 (or 2)
Why don’t you just set a circle type fence equal to say 1000 meters. I don’t think you will fly a 500 size heli that far. If you do, make it 2000. You just want the function of not arming the motors without home position detected. Just a suggestion.
Can’t beat telemetry on the Transmitter telling you exactly what’s going on!
Yeah so true. I highly recommend Yaapu telemetry on a suitable transmitter and receiver combo - with one warning!
You will be addicted and you’ll be looking to add flight controllers and Yaapu telemetry to the family car, bicycle, kids, neighbors dog…
1 Like
Ha, ha! And all home appliances. Hey, Alex could produce a better IOT Controller!
Yup I have activated all the telemetry on my crossfire receiver. Yappu tells everything and the best part is Yappu tells when GPX Fix is achieved and when Fence is ready to arm the motors. Exactly what you want before arming the motors. And adding a GPS mate battery makes the waiting time very short after the first GPS routines.
Thanks for all those replies. Seems like I misunderstood (or my previous info was wrong), so I’ll set up a circular fence. Even 500m radius will be plenty for me!
I will look into Yaapu telemetry once I’ve got this sorted but, for me, one thing at a time is enough ![]()