I am putting ardupilot in an expensive UAV and would like to have an option to physically bypass the autopilot, as a backup, in case the autopilot would seize up. Kind of like this example
Anyone who has tested something like this or knows a good way to solve it? I could think of several potential ways, but none that is completely elegant.
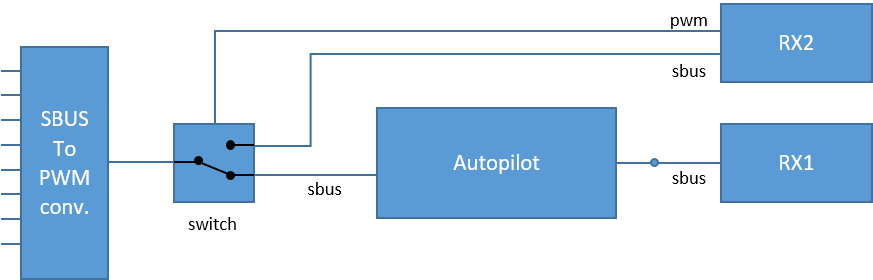
Yes, but this assumes that the autopilot works. Maybe I am overly cautious, but I would like a solution that would allow me to land manually if the autopilot, or my default transmitter brakes down, thus controlling the the servos from RX2 (picture above). Assumption here is that the “switch”, is a low level circuit less likely to fail than the autopilot.
I dont know . I’m happy for any opinions on this. Maybe the IOMCU co-processor is as unlikely to fail as a low level external switch.
Not sure though I can get a secondary backup transmitter to work with an IOMCU equipped AP (like CUBE). So for the unlikely event that my transmitter fails, I would like to be able to pick up the backup transmitter an take control trough the flick of one of its switches. I know I can get secondary RX to work, but the logic is that the AP takes the signal from the secondary RX if it gets no valid signal from the primary RX (not a channel change on the secondary transmitter).
In principle it is possible to use a kind of RC PWM switch to do the job.
But some points need to be pointed:
as Amilcar Lucas stated any additional electrnic is a additional possible point of failure. What happens if not the FC dies throught the flight but the switch?
if you use such switch it must be fully electronical switch. An mechanial relay based switch can and will produce problems on the SBUS signal.
and the function on your block diagramm assumes that RX2 channel is always functonal.
Some years ago we did it to switch between two different autopilots using this:
But you have to double check the signal levels and the wiring alone is quite anoying.
it worked for us OKish, but we threw all of that out to make a simple ardupilot only aircraft.
Brilliant! love Pololu stuff
Yes switching all the PWM outputs is probably better, but I drew the simplest option to illustrate the problem. Thank you Christian, you have given me a solution. I will buy some to test, and we’ll see what the solution turns out to be in the end.
Regarding the in / output voltage check the datasheet of the used 74VHC157 multiplexer. If a 3.3V datastream should be switched the Vcc voltage of the module should be not higher as 4,7V
A small note:
Adding another single point of failure to the system does not decrease the failure rate of the whole system (in fact, it just increases it).
There was an excellent presentation last year on AP dev conf about reliability and redundancy, worth to check it out: https://www.youtube.com/watch?v=aVGOXk4hVXY&t=2433s&ab_channel=ArduPilot