Shouldn’t be necessary and I would love more people to test the dshot on iomcu behaviour
Hi @ , I saw that in your parameter list esc , these 2 parameters are set with the same value . Is there any reason in particular ? Thanks
Those are the default values and we did not need to change them, it’s an output not an input, output trimming an a copter is meaningless.
Are you saying from 4.5.0 and above, users going forward can have digital ESC Octocopter using the Analog main out port?
Thanks and noted.
Should I wait until everyone is saying?
If BRD_IO_DSHOT parameter is not present, then the autopilot does not have DShot capability on its IOMCU outoputs.
Correct. Not sure who you are waiting for if I am saying and the wiki is saying…
I will soon release a new version of the diatone_taycan_mxc.zip file containing updated python scripts.
It will optionally annotate default parameters as comments in the intermediate .param files if a 00_default.parm file exists.
To use it do:
./extract_param_defaults.py bin-file.bin > 00_default.param
./annotate_params.py .
It needs to use a .bin log file from your FC because each FC type and FW version has different default values.
I will ship the default values for my FC in my intermediate .param files but the two commands above will allow you to get your defaults in your intermediate .param files.
To make it more interesting I will post this once someone posts their edited intermediate .param files in a .zip file in this thread. ![]()
Who will be the first?
4 Likes
I’ve just been playing with that script on a few log files. That will be very useful in the future!
I’ve got a build on the bench with a H743-wlite on a Holybro X500V2 frame. Let’s see if I do a better job this time of keeping notes and creating the param files for the process.
2 Likes
Hello everyone!
Hey friends, I need your help clarifying some issues. They might seem trivial, but it would be even sillier not to ask them, right?
-
When setting up the notch filter, we use the bidirectional shot firmware with ESC (BLHeli32). We connect the ESC controllers via signal wire and also connect them with additional wire to UART-port. But isn’t it enough to simply connect them without to connect to UART? After all, the bdshot protocol is designed to transmit/receive data over a single signal wire. I understand that using uart we get more information like temp, voltage etc, but for notch filter we need the RPM only.
-
This is a continuation of the first question. After analyzing the log file (for notch filter calculation), do we still need to keep the UART-port connection for the controllers? I understand that we only need this connection to determine which frequencies to suppress vibration, and later the motor RPM value is not necessary for us. Plus, the Orange Cube already has four free UART ports(((
-
Should the SERVO_BLH_MASK parameter be the same as SERVO_BLH_BDMASK (in my case, Orange Cube, hexa, and SERVO_BLH_BDMASK=16128), or should it be set to zero?
Please don’t scold me too much for such questions, I’m still learning)))
-
It’s a simple wire, and you have the advantage of a redundant voltage monitor
-
No, you need it permanent RPM feedback for the dynamic notch.
-
yes.
1 Like
Allister,I want you to do 100 lines I will keep notes for refference,I need to do the same lol
1 Like
Amilcarlucas, thank you a lot!
Here is a small presentation that I just did in the ArduPilot partners meeting: presentation.odp.zip (46.3 KB)
3 Likes
Hi Amilcar
thank for your Job. I made the IMU temperature calibration just time ago over two FC: Pixhawk 6C (2 IMUs) and Pixhack V3x (3 IMUs). I want to share my results in order to know your opinion about the results:
Pixhawk 6C
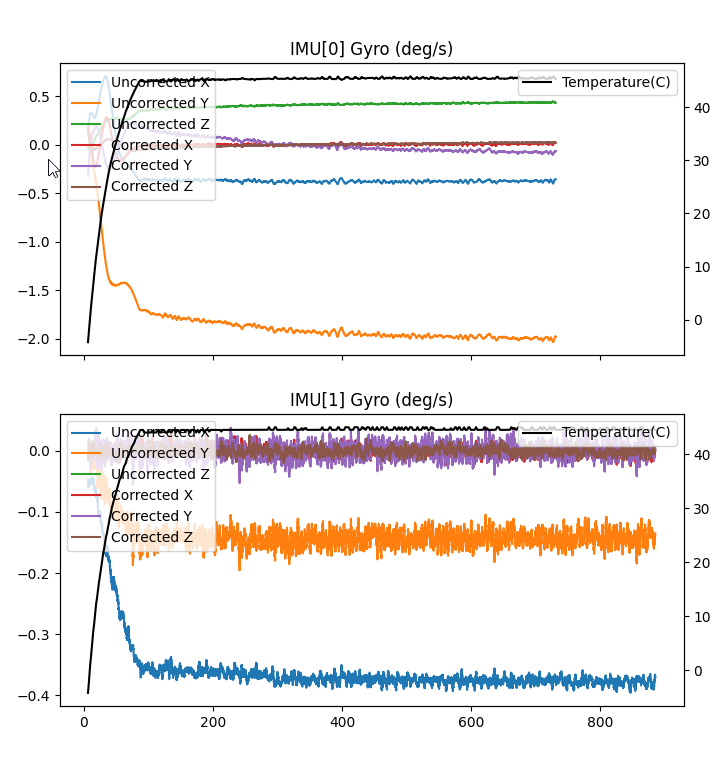
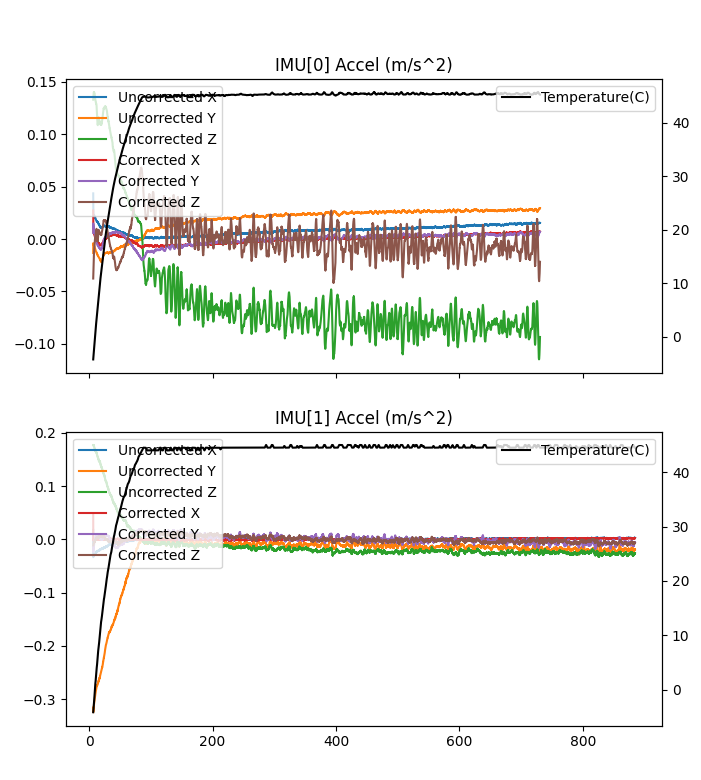
In this case, my doubt is about the temperature behavior, it doesn’t look like a “classic” algorithm curve, the rate looks soo high. do you think?
Pixhack V3x :
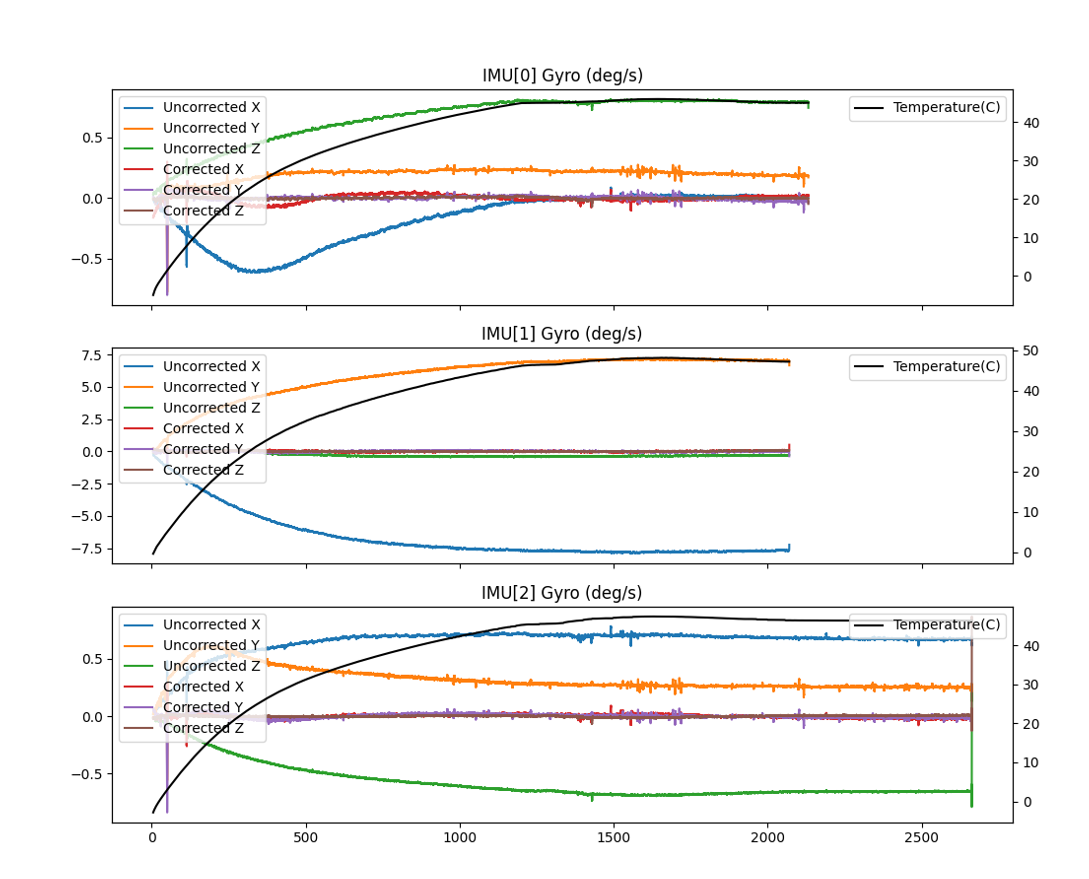
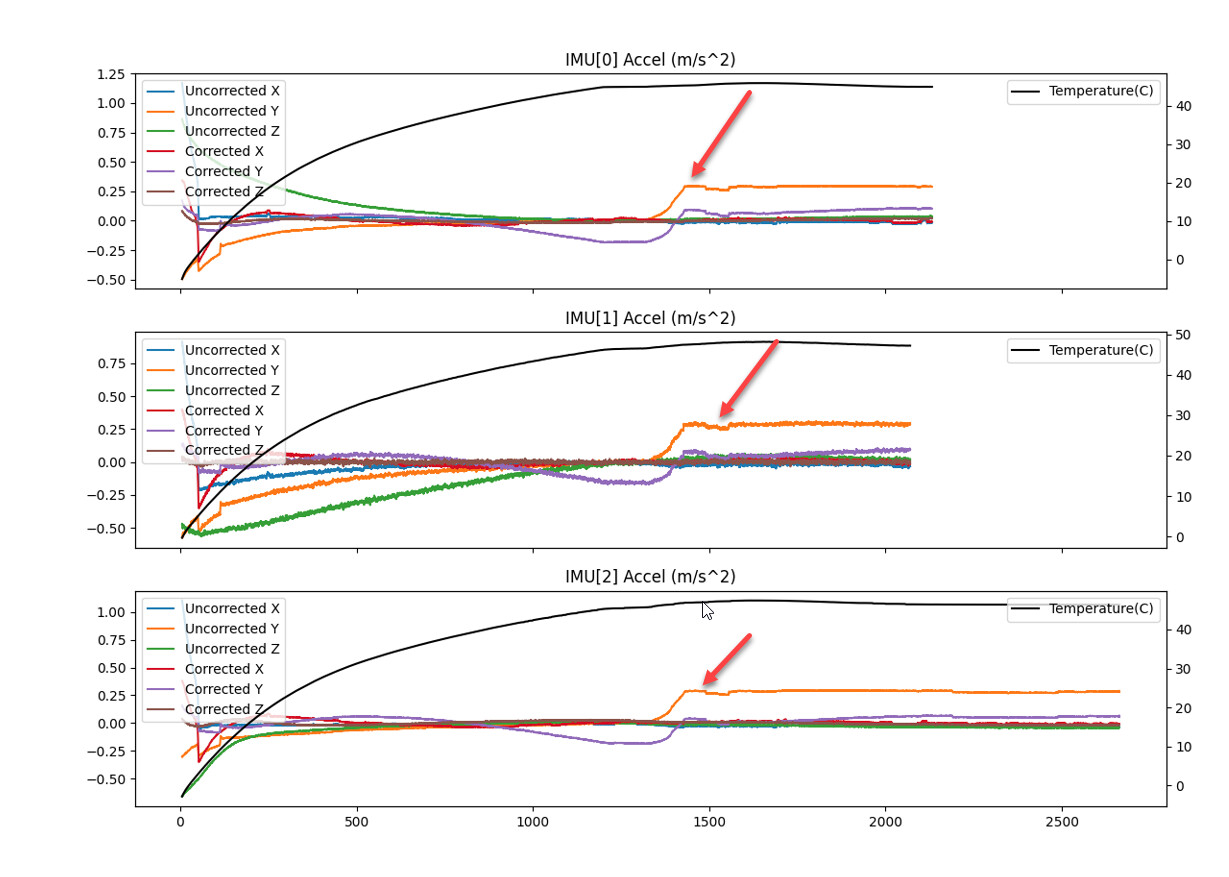
In this case my doubt is about the Accel curves (all IMUs); it shows a slope in the “uncorrected Y” and “corrected Y” (point by red arrow). I don’t know if it is a sign of movement during the calibration period.
Thank you for your time, and whoever wants to comments
It could be movement, but it was slow. Just repeat the calibration.
@iampete can you please delete your first post in this thread so that I can extend the first post into a second one? Thanks.
I will change the (current) third post, so I repost it here so that it will not get lost:
Thank you @iampete for building the webtools. I am missing one though: https://github.com/ArduPilot/ardupilot/blob/master/Tools/scripts/tempcal_IMU.py
If that one gets implemented, the users will not need to install python on their computers.
And having a step-response settling-time @ 5 % calculation on the PID Review Tool would make it easier to quantify the quality of the results.
@amilcarlucas do you think its worth installing bluejay onto blheli-s controllers to get esc telemetry on small quads in order to a better tune?
Yes, of course. In 2024 not having ESC telemetry should be considered a crime.
You need a very good reason not to have telemetry.
3 Likes
See Help 5 inch racing FPV drone Tunning using Ardupilot - #7 by amilcarlucas for a parameter analysis