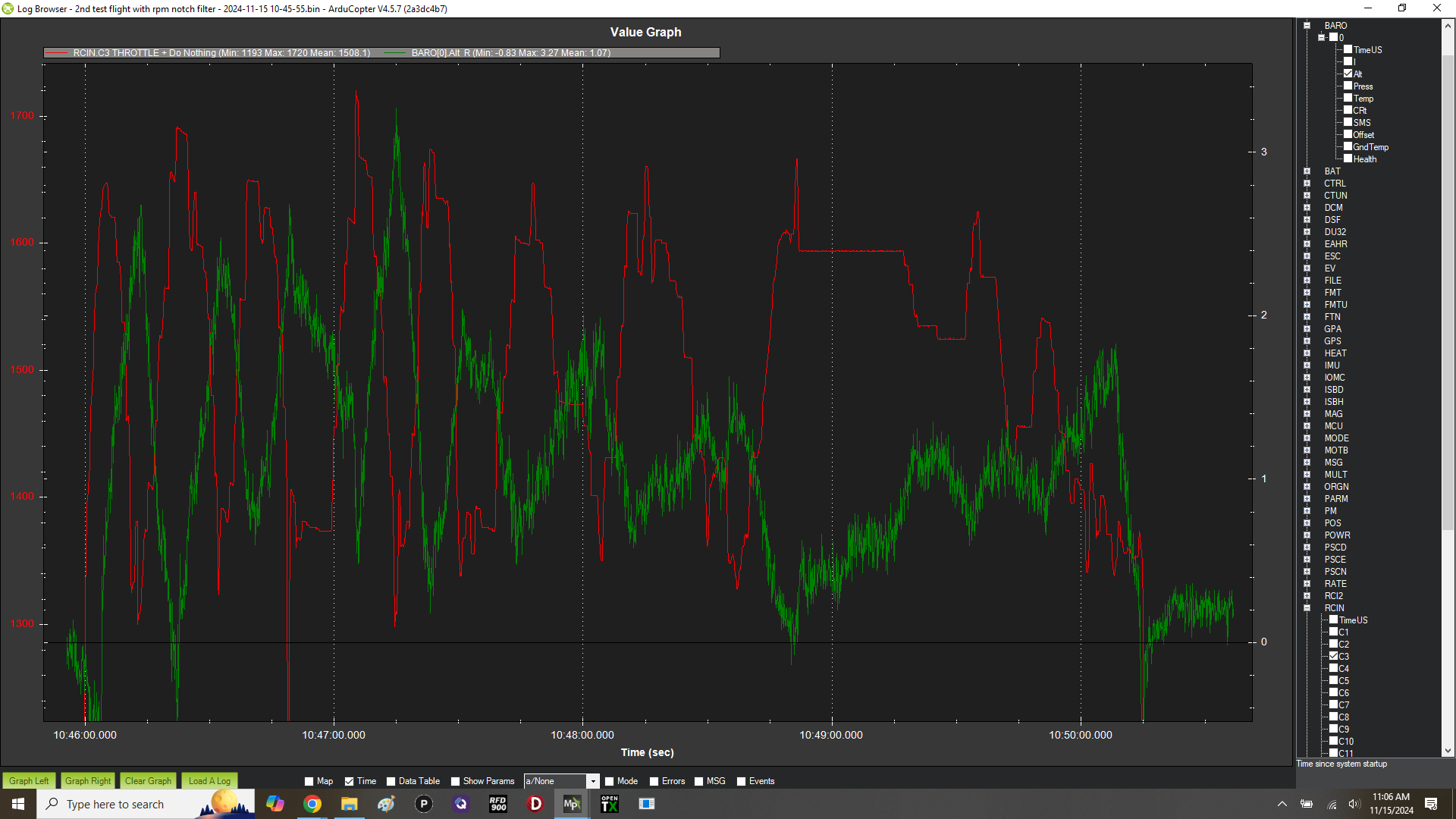
In my test flights I’m finding that my throttle inputs to achieve a constant hover altitude tend to overshoot. I have mot_thst_over set to “2” - for learn and save. But as you can see by this chart I’m having to “chase” the proper throttle input.
If this is in stabilize mode, you can expect very touchy throttle control. You have the full throttle range at your disposal, unlike alt hold or loiter.
Chasing the throttle position likely hurts the hover learn algorithm. Attain enough altitude that you can put the throttle in the center position and leave it there while the autopilot sorts it out (doesn’t take long). Setting MOT_THST_HOVER to a best guess from the start might help (especially if you are flying similar hardware as a known/previous config).
Ensure you follow the instructions for initial parameters and the follow-on PSC* values after an alt hold flight.