When i pull the throttle handle up (No left, right… just up) the motors are not spinning evenly. How to calibrate that?
This is meaningless if you are doing it on the bench w/o props.
When i put the props and pull up to go vertically, the drone goes in a weird direction
Has the uav been set up according to the instructions on the wiki? Or did you “cut some corners” and skiped some of the instructions?
Please post a .bin file with the undesired behavior.
Then troubleshoot that. The only useful information you will get on the bench w/o props is with the Motor Test function. Post a link to .bin flight log file where this was experienced.
This is useful guys. Thanks.
I will download and attach a file.
Isn’t there a place in configuration where we can map PWM to motor speed?
Do you have ESC’s that support ESC telemetry or Dshot and running a bidirectional version of Arducopter? We know the answer to this so… no.
You are mean to me ![]()
![]()
I will upload a BIN
Thanks again.
It’s the only way to get motor RPM ![]()
Hello,
This is the BIN.
I appreciate your help
Did you perform an accelerometer calibration? It doesn’t look like it. Also you didn’t perform the Initial Parameter Setup in Mission Planner. Setup>Mandatory Hardware> Initial Parameter Setup. You don’t have battery logging configured. And your Flight Controller Vcc is under brownout voltage, dipping down to 4.4V at one point. Which Flight Controller is this and how are you powering it?
Hello,
I did accelerator calibration
As a matter of fact, i followed all the steps of this video
 PixHawk Video Series - Simple initial setup, config and calibration")
I don’t have battery logging (I didn’t know how to set it up)
My Flight controller is Pixhawk 2.4.8 (like the video)
My battery is a Lipo 4S and the Pixhawk is connected via the power module.
I have this set of components https://www.aliexpress.com/item/4000109183247.html
I built my own power distribution wiring
Lipo cable to Powe Module AND to 4 other XT60 female plugs to 4 ESCs
When the craft is level sitting on the bench does it show level in the HUD in Mission Planner?
The power module could be faulty. Because this is way too low:
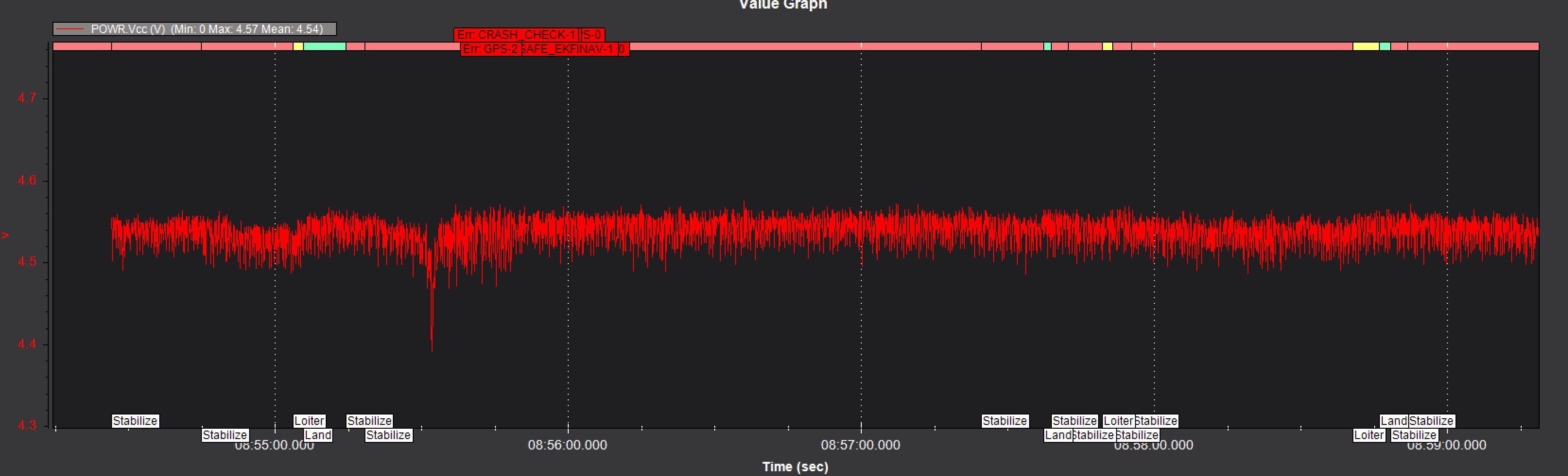
Measure the module output with a voltmeter, it should be 5.3V
On altitude: It flickers and changes -0.05 to +0.35
That is irrespective of whether the motors are spinning or not.
Is this is an issue impacting the speed of motors?
I changed the power module now. I will look at VCC again and maybe use a voltmeter (without destroying the module.
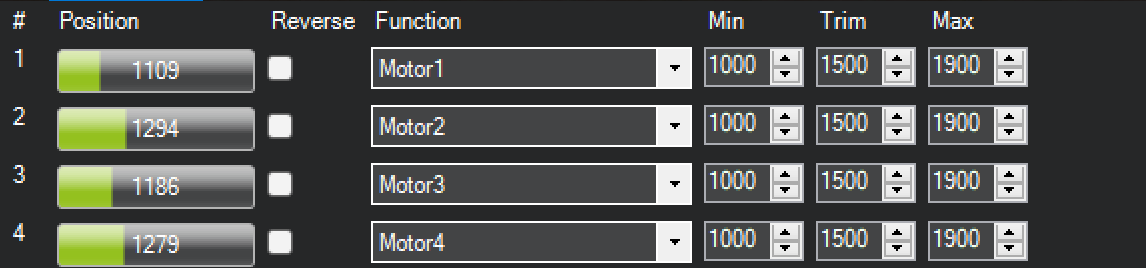
On the same note: The image i shared initially (first opening post on the thread) has a column called “POSITION”. I presumed this the the RPM in the context of a DRONE. right?
Wrong. This is the commanded PWM output. The motor RPM is a function of several variables.
Ok - noted.
So i am right to think that POSITION should be all the same on all motors when I am hovering?
(Throttle up no left and right)
Which is not the case in my setup (just going back to basics to avoid being lost)
If everything were perfectly aligned and the CG is in the center they will be close. Have you actually done any hovering?
I pulled the throttle up to go vertical the drone went up and then pulled itself to go forward (Motors 1 and 3 are front while 2 and 4 are back)
so it didn’t stabilize and hover, it went straight forward
Hello again,
I redid the all at once calibration as described in Electronic Speed Controller (ESC) Calibration — Copter documentation
Also i re-calibrated my radio
I did 3 tests:
1- ESC Type was set as “Normal”
2- ESC Type was set to “PWMRange”
3- I set my motors in SERVO OUTPUT to RCBypass
for (1) and (2), I pulled throttle from ZERO to MAZ and the same behavior… PWM output in servo output on 4 motors were not aligned (Same or close) they were super awekward
for (3) I confirm that PWM values follow what the RC is saying (Throttle @ MIN is reflected on MOTOR 1,…)
Conclusion: It’s as if when throttle is moved up ALONE (no left and right) the Pixhawk is not mapping the right PWM.
My configuration is a “Quadcopter”.
What else should i test and look at?
P.S: I ordered the following ESC set Cyclone 35A 45A BLHeli_S ESC Support 2 6S Power Supply DShot 150/300/600 Oneshot 125 For RC FPV Quadcopter Airplanes Drone|Parts & Accessories| - AliExpress
Are the popelors attached?
Is the copter pinned dowm to not move?
If yes, your test results are invalid and must be ignored.