Hi! I am building a 17 inch X8 copter and already done the maidem flight which went well.
Now I am setting the notch filter parameters and I want to use esc telemetry mode. Because I will use INS_HNTCH_OPTS 6, I will have one notch per motor and so I know that I should reduce the INS_HNTCH_BW significantly to avoid phase lag.
Since the motors frequency are around 40hz, I think I should set INS_HNTCH_FREQ to 30 (approx 0.7 x motor frequency) and INS_HNTCH_BW to 4 or 5 (approx INS_HNTCH_FREQ/Number of motors).
Is this correct? Or is INS_HNTCH_FREQ 30 too low and will get into the control bandwith??
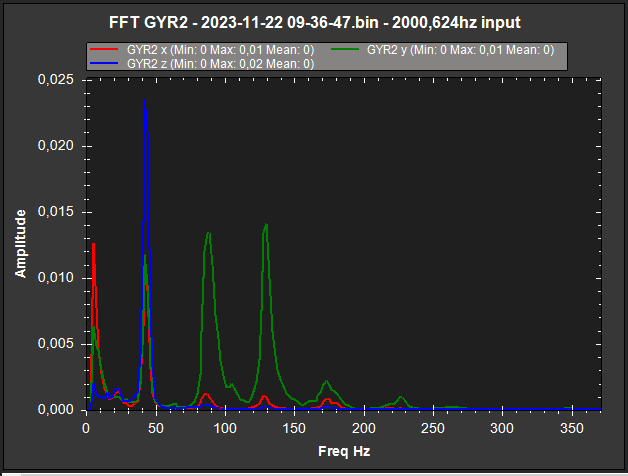
Another doubt is what should I do with INS_HNTCH_HMNCS? In the graphs below you can see that maybe I should set INS_HNTCH_HMNCS to 7 because I have the main harmonic and two other relevant harmonics. However, there are other two smaller peaks at 175hz and 225hz. Should I consider them and set INS_HNTCH_HMNCS to 31 or will it introduce too much delay or lag?
FFT pre-filter:
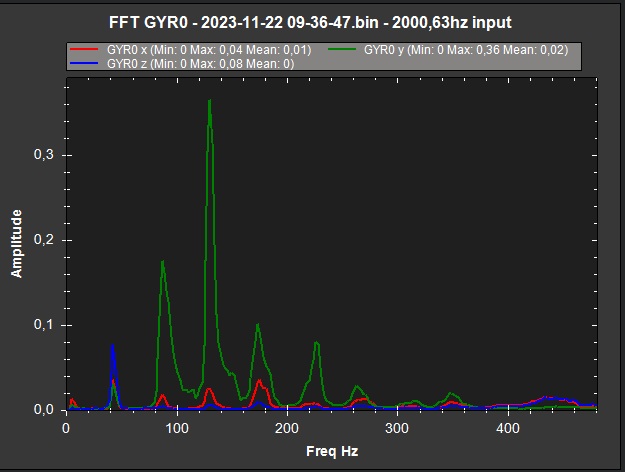
FFT post-filter: