Hi guys.
Is there a way from a log to see if the external compass, magnetometer is seeing interference from motors, esc’s, wiring, etc. during flight? If so, can someone please explain what to look for in the log? Thank you.
David
Hi guys.
Is there a way from a log to see if the external compass, magnetometer is seeing interference from motors, esc’s, wiring, etc. during flight? If so, can someone please explain what to look for in the log? Thank you.
David
One of the easiest ways to tell is by looking at total mag field strength vs. battery current (or throttle, if you dont have a current sensor).
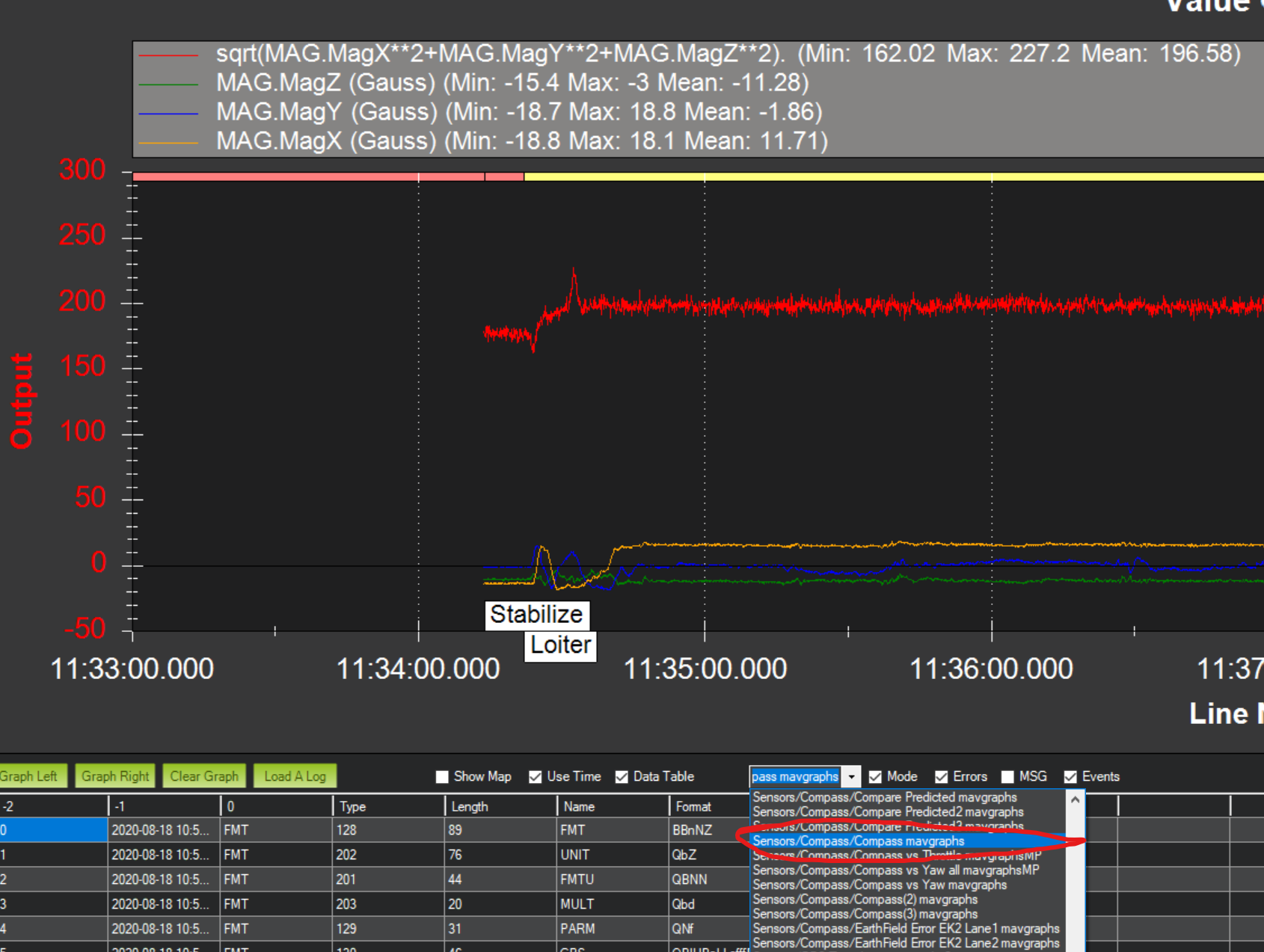
Mission Planner’s log analyzer has has a built-in function for mag field:
The red line is total field strength. Plot it against current or throttle. The field strength should not change much (less than 5-10%). A good way to test this would be to bounce your drone up and down in the air with big throttle inputs.
The compass-motor calibration is meant to compensate for this effect.
Great, thank you Rick. I will do a dynamic flight and look at the log. Appreciate the help!!!
David
I am facing toilet bowling issue on my 5" inch props quadcopter, generally i found on this discussion forum that magnetic interference at compass have a role to play when toilet bowling happens, but in my log, total field strength is not changing/varying much during the flight when there is toilet bowling, that’s why auto analysis also showing good compass status ( mag intereference change is generally under or around 20% )
But this issue arises very rarely after multiple flights, i am going to try compass/motor calibration but i am not sure if it will be helpful as i don’t have battery current monitor and i am using external compass so i have to set-up CompassMot using throttle. Is there anything else which i can possibly try ?
Yeah first try seeing if the compass-motor calibration helps. Motor interference is pretty common on smaller drones, even with external compasses.
What altitude do you fly them at? ArduCopter compensates for the ground magnetic field by resetting the EKF’s yaw estimate once you reach 2.5 meters altitude. Depending on your environment, it’s possible to have compass issues due to ground mag field effects, either by flying at very low altitude, or if your environment has a particularly strong ground mag field and requires a higher reset altitude.
Gotcha, right now flying at relatively low altitudes, about 5 meters off the ground, but environment/surrounding is quite open and clear
Hey Rick how did you plot the total mag field with that equation on data log viewer?
In Mission Planner, I think the only way to do that is to select one of the pre-made graphs from the dropdown menu (red circle in that image).
MAVExplorer lets you come up with your own equations if you need something specific.
Looking at it some more, it looks like it is pretty easy to add your own equation graphs to Mission Planner.
In C:\Program Files (x86)\Mission Planner\graphs (or whatever your installation directory is), there are xml files which define the custom graphs. You can probably just create your own if you study the syntax used in the other expressions.