Hey guys, just done a few tests by setting the yaw loops P to zero (both angle and rate), using the full parameter tree screen.
Yaw is effectively killed, but the behaviour looks somehow random and hard to figure out.
I’m attaching 3 logs, made with yaw P angle and rate set to 0, than set respectively to 0.1 and 0.001 (just to have a non 0 value), and finally set to the minimum acceptable values (3 and 0.10).
Honestly, however, I probably need more help here: there’s something that I cannot figure out in any of these logs.
Just to recap, this is an unconventional EDF VTOL platform (8 EDF pushing downwards, 2 side by side in the nose, 2 side by side in the right wing, 2 side by side in the left wing, and 2 side by side in the bottom), now flying tethered to a hook for safety reasons. The strange thing is that it keeps attitude quite well with current parameters, but responds to the RC inputs very bad.
Pitch and roll seem somehow mixed up, sometimes even reversed… Really can’t figure out what’s the point here.
Here for example:
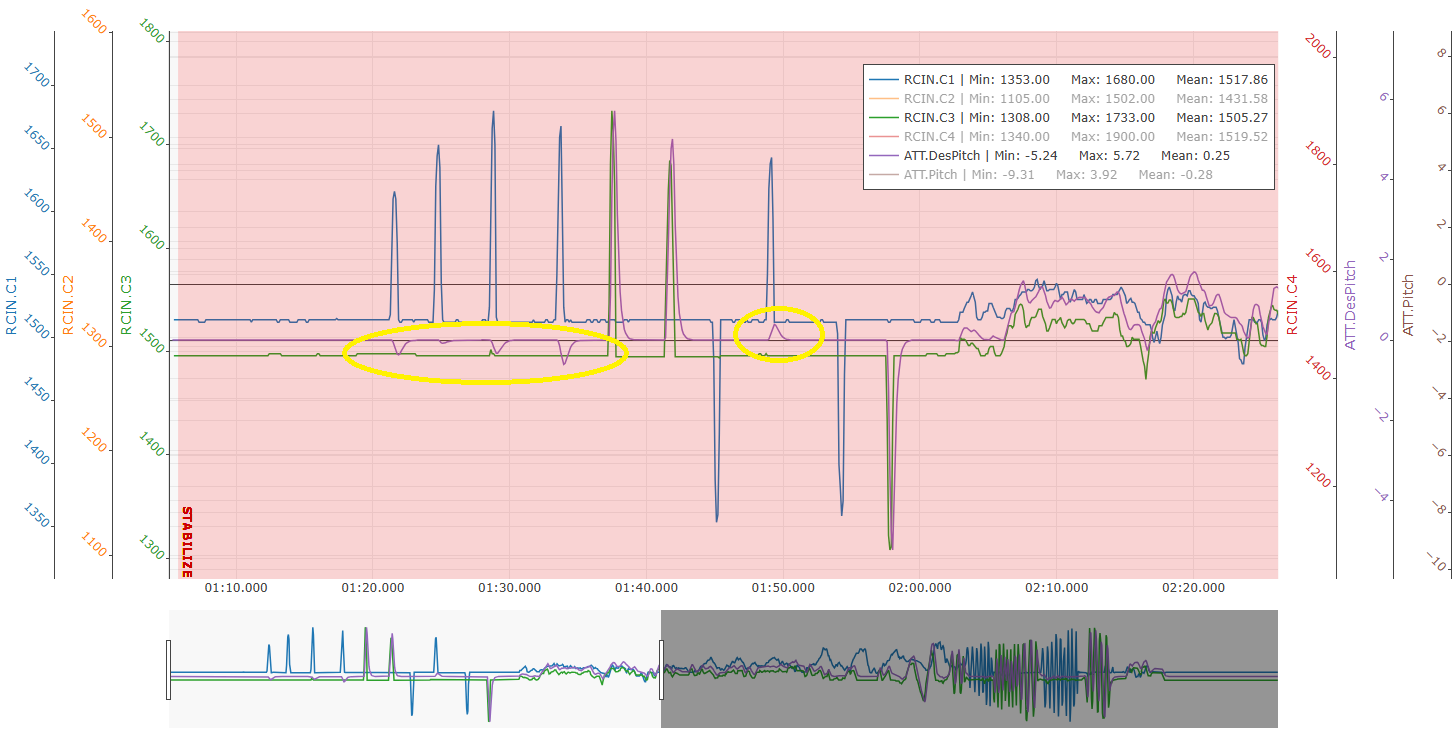
we’re in AltHold, and DesPitch shall follow RCinput3 (violet shall follow green), but you can see some movement even when touching RCinput1 (roll): [log 20-13-17, with yaw P set to 0.1]
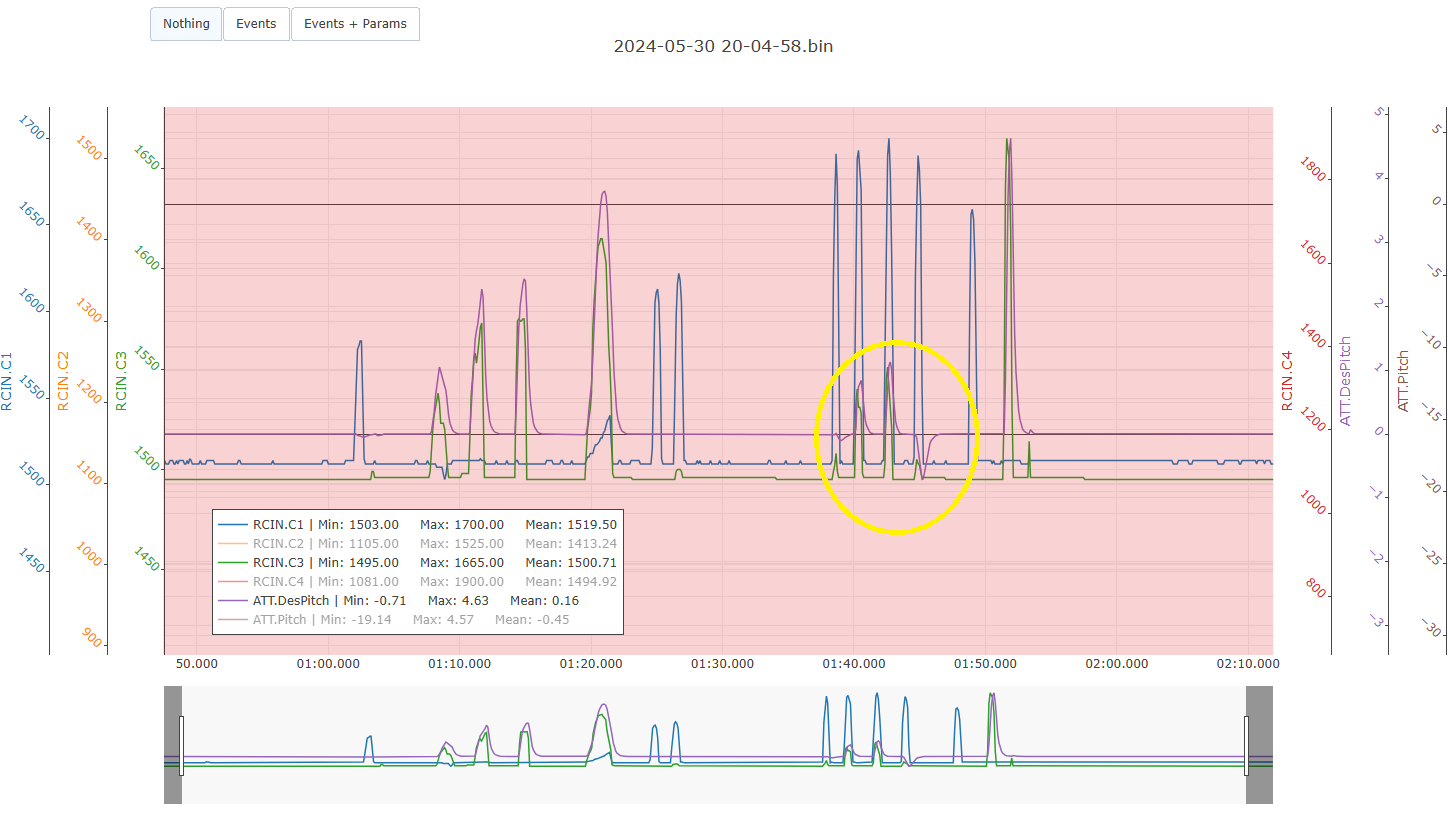
or here, violet shall follow green, but: [log 20-04-58, with yaw P set to default minimum values]
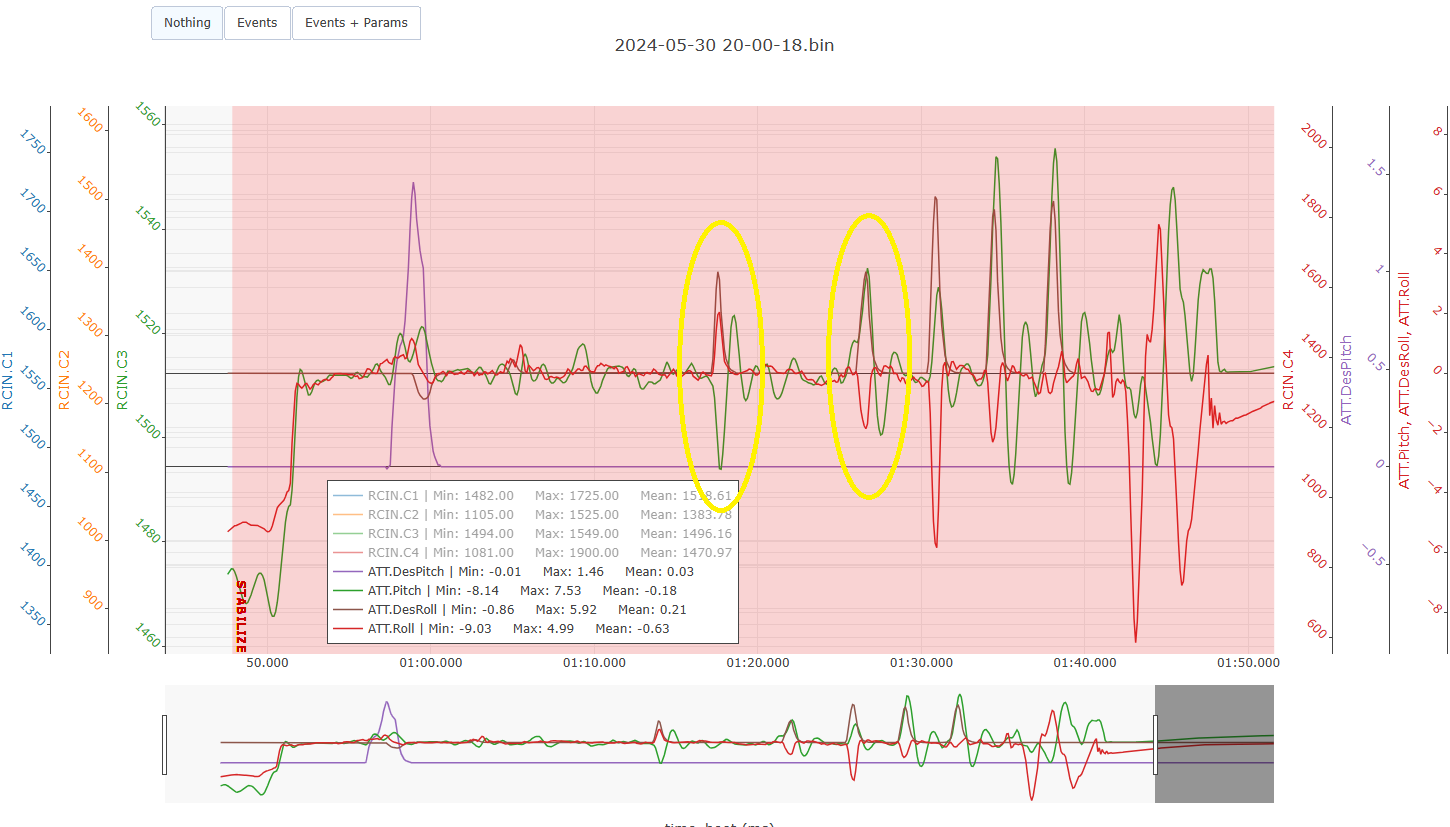
or here, different problem: desired roll and actual roll - how’s that once the actual roll follows the desired, and a second after it doesn’t exactly the opposite???
Even if not commanded, also the actual pitch worked in 2 different directions in the 2 cases [log 20-00-18, with yaw P set to zero]:
Shall I open a new post for this?
I can’t see any link between this behaviour and the tether, and not even with the yaw, since one of the strange behaviours was with normal values.
Maybe one of you guys could help figuring out this strange behaviours, and suggest new parameters to try for a better tuning on roll and pitch.
Thank you so much to anybody willing to help!
Here’s the logs and parameters file:
https://www.dropbox.com/scl/fo/atjo5sc55t3t6s42t5ctr/AKzfqTfxypUmChRb8pcpkWo?rlkey=nx0gf4uxrpsiqx3435qo53udx&dl=0