Solution: If the speed exceeds 20 meters per second, the height will decrease
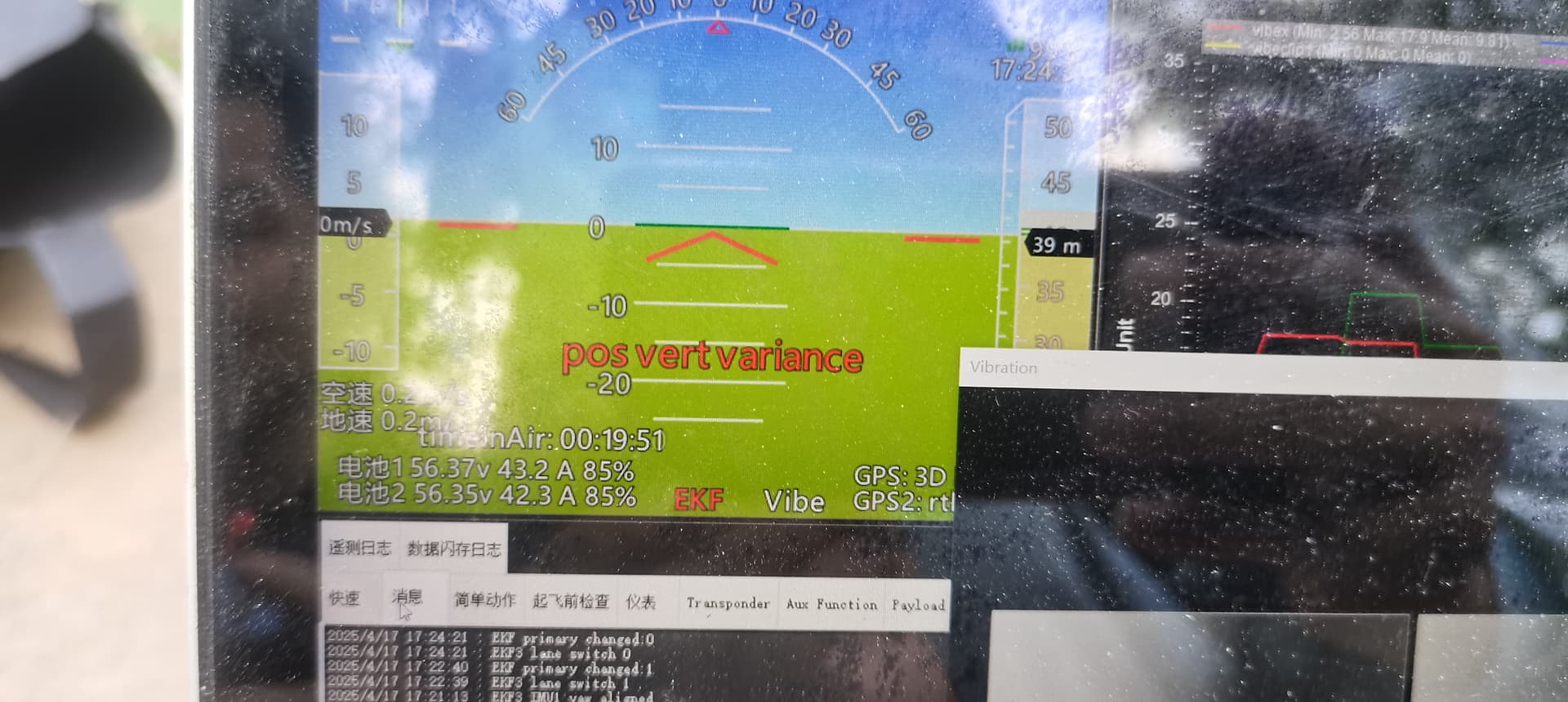
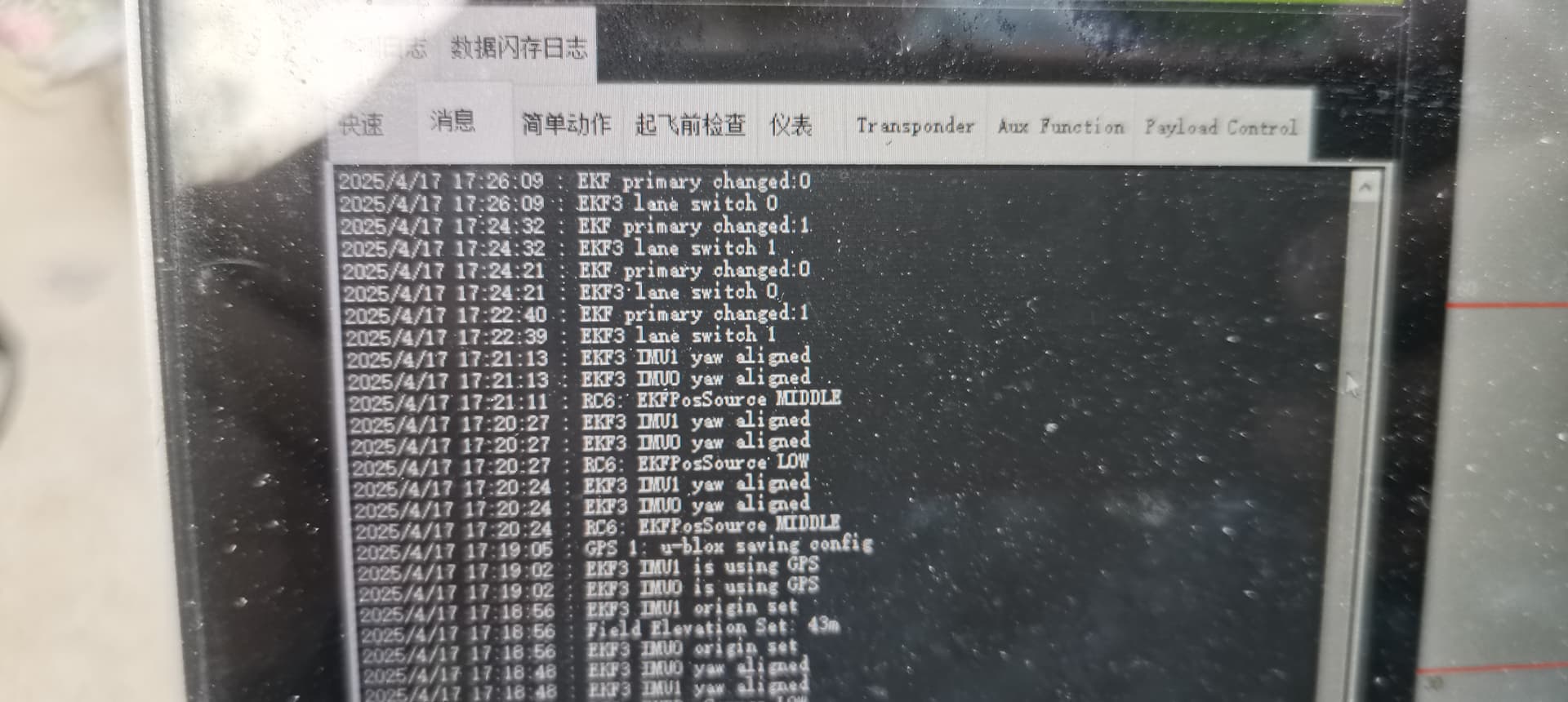
When the speed exceeds 30 meters per second, the EKF will automatically switch due to SH exceeding the safe value
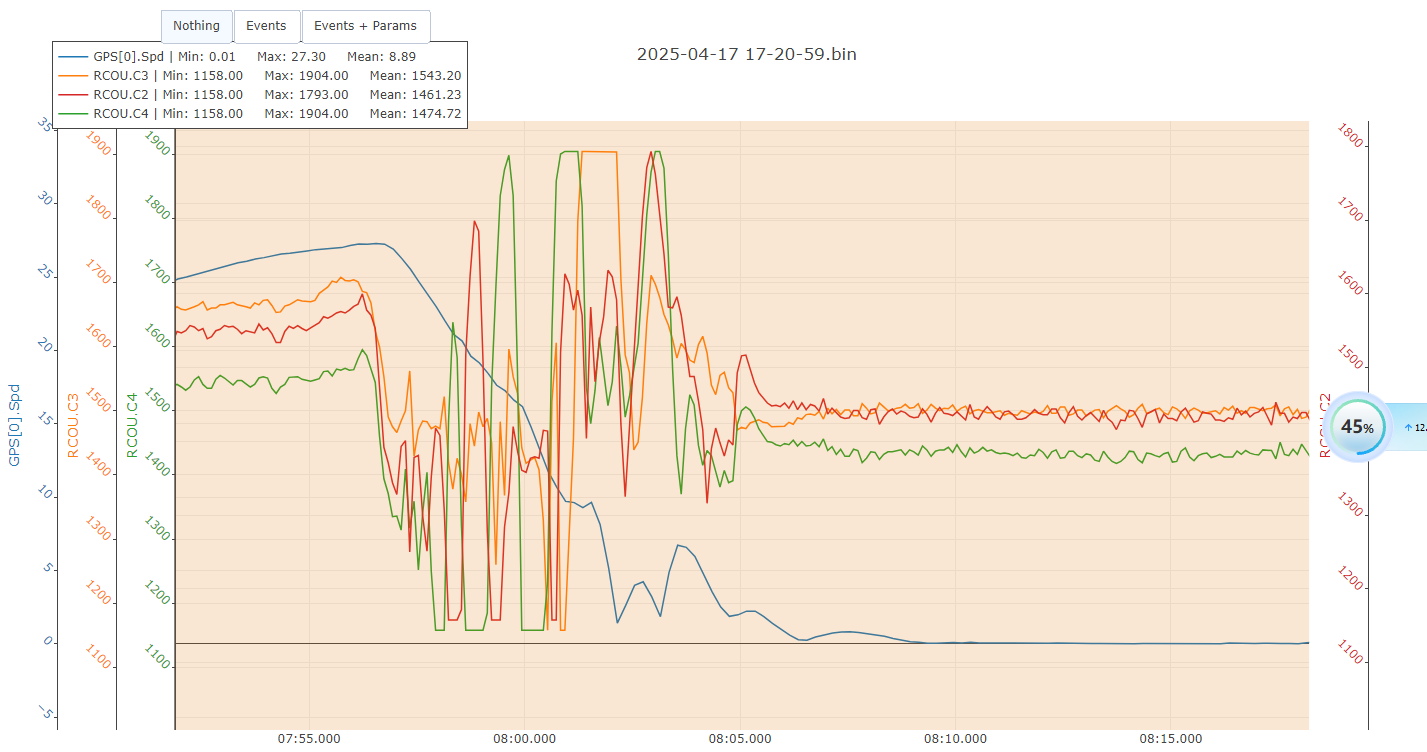
Solve the problem of attitude collapse caused by braking at a speed greater than 20 meters per second, and RC output approaches the lowest value at this time.
Before this flight, I tried a speed of 25 meters per second without any problems. However, when I increased the speed to 30 meters per second, I almost crashed during the final braking. Normal will resume in a few seconds.
When the flight speed exceeds 100 kilometers per hour, releasing the brake results in a significant decrease in altitude. The last time there was a posture collapse.
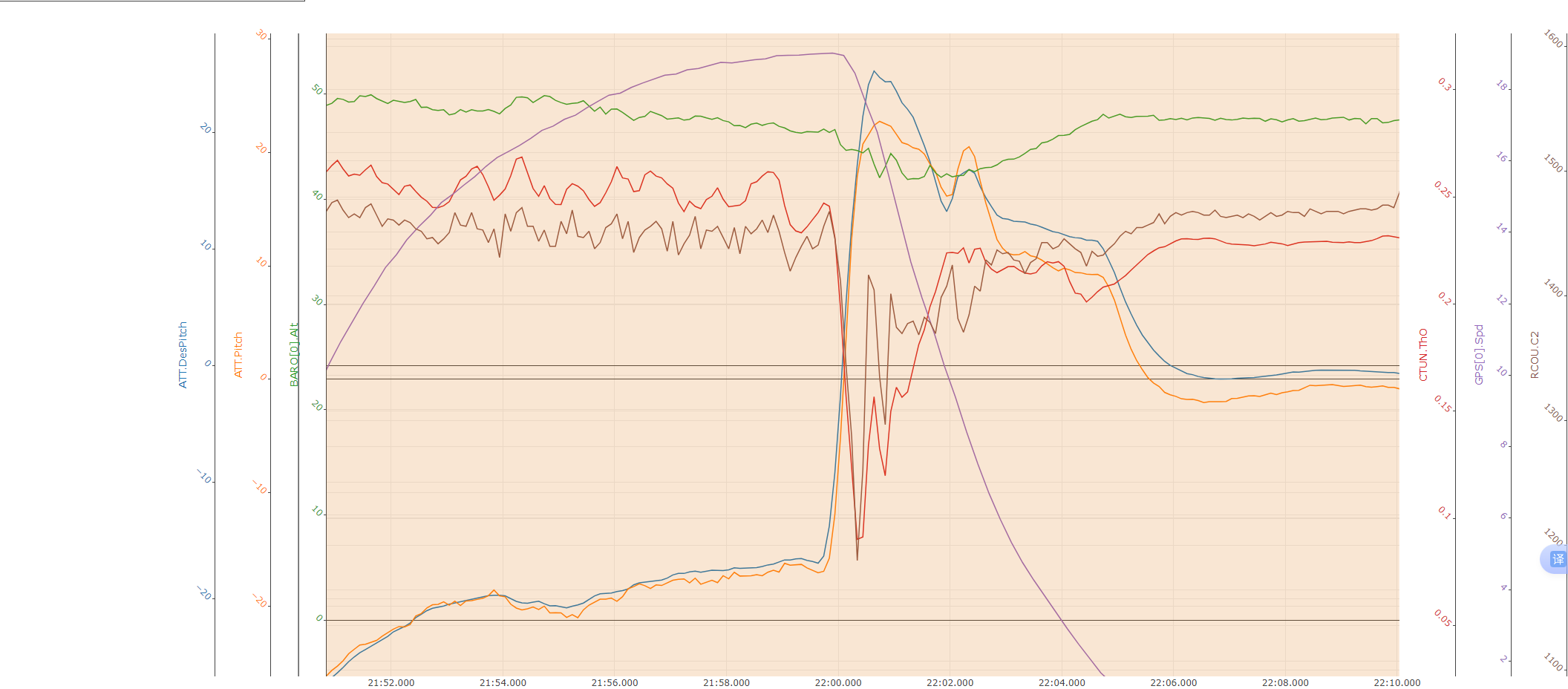
Viewing the data, the motor output is close to the minimum output when a crash occurs.
When I release the forward lever at a speed of 100 kilometers per hour, there will still be an error. Previously, it was caused by vibration, but not this time.
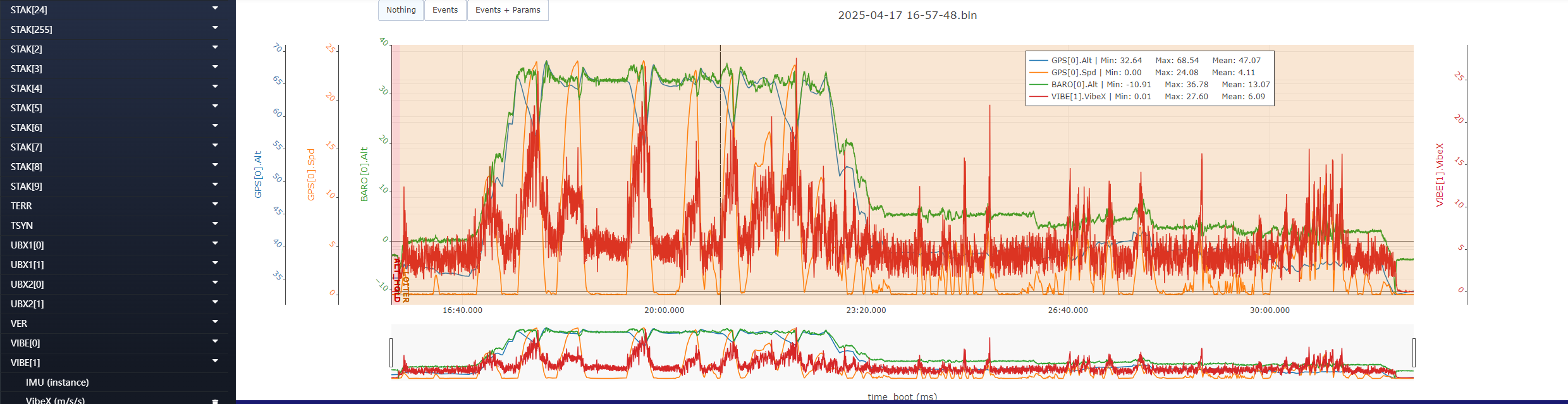
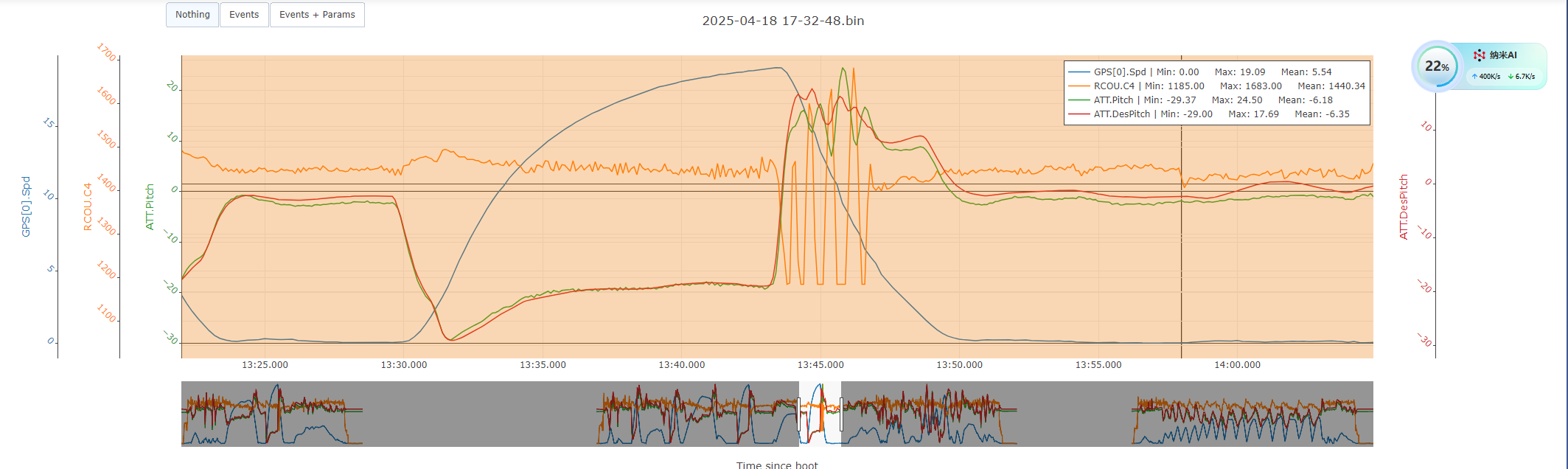
This is a data chart of me flying at a speed of 25 meters per second without any errors. However, there were errors and EKF switching issues in the data at a speed of 30 meters per second. Could it be a malfunction caused by speed? It can be seen that the VB at 25 meters per second and 30 meters per second did not exceed 30, so it is definitely not caused by vibration.
But all flights, whether they are 25 meters or 30 meters per second, will experience a decrease in altitude as the speed increases
I have found the reason for EKF conversion, which is that when the speed approaches 30 meters per second, suddenly braking directly will cause the SH of EKF to exceed 0.8. As for what causes the exceeding, I need everyone’s help to see and solve it if possible.
Today I tested two more takeoffs and landings, and as long as the speed is controlled within 25 meters per second, the EKF conversion will not be triggered. However, direct braking can still cause brief and significant shaking of the posture.
When the posture shakes after braking, the RC output approaches the lowest value of 1180. Today, I raised the lowest value from 0.12 to 0.15, which seems to have improved a bit. The shaking is not as severe. We need everyone’s help to see if there is a way to improve this place.
The area where there is a significant decrease in altitude is when braking, and it should not be a problem of insufficient battery power. However, there was a slight drop in altitude when flying at a speed of 30 meters per second.
Have you tried to lower LOIT_BRK_ACCEL value ? Because it is heavy copter flying fast, it won’t be easy for it to achieve a hard breaking and maintaining altitude at the same time. LOIT_BRK_JERK value, which is 3000, is much higher than our copter’s, 500 as well.
I also experienced quite a few times with quad copter or quadX copters loosing altitude on breaking. In your case, the height drop is huge though. It probably is proportional to the speed right before deceleration. Just a guess though.
I have resolved the issue of the brake causing the crash. It’s not an issue with LOIT-BRK-ACCEL. My setting for LOIT-BRK-ACCEL is 125, which is lower than the default value. LOIT-BRK_JERK is specifically set to 3000 to make manual control more flexible.
I solved the problem by lowering the MOT exp and other settings to speed up the system’s low-speed response capability, as I had replaced the blades with new ones.
The only problem now is that the altitude will decrease when braking, and when the speed reaches 30 meters per second and suddenly brakes, the altitude sensor EKF will exceed 0.8, causing the EKF to switch.
All the recent changes are aimed at breaking through 100 kilometers per hour. My previous settings were very stable,
@nerakai
How about lowering ATC_THR_MIX_MAN value a bit more from 0.5? Lower value priorities throttle over attitude control and it could prevent the vehicle loosing altitude on sudden hard breaking.
BTW, I found the LOIT_BRK_ACCEL value on your copter as 180 from the parameter you posted above unless it was already modified down to 125 as you mentioned. How about 100? or even less than that. Vehicle will travel further on breaking but it might prevent the copter loosing altitude.