Typically the motor connection order is incorrect or the motor rotation direction is incorrect. Verify those first. There are many posts on this forum from users experiencing the same problem as you, and the solution has been explained just as many times.
Use the motor test function in Mission Planner to make sure the motors are running correctly. It is not the same as Betaflight so if you’ve number the motors by the markings on a 4-in-1 ESC they may not be correct. Post a .bin log file of your attempt and maybe we can see what’s going on. But most likely motor order.
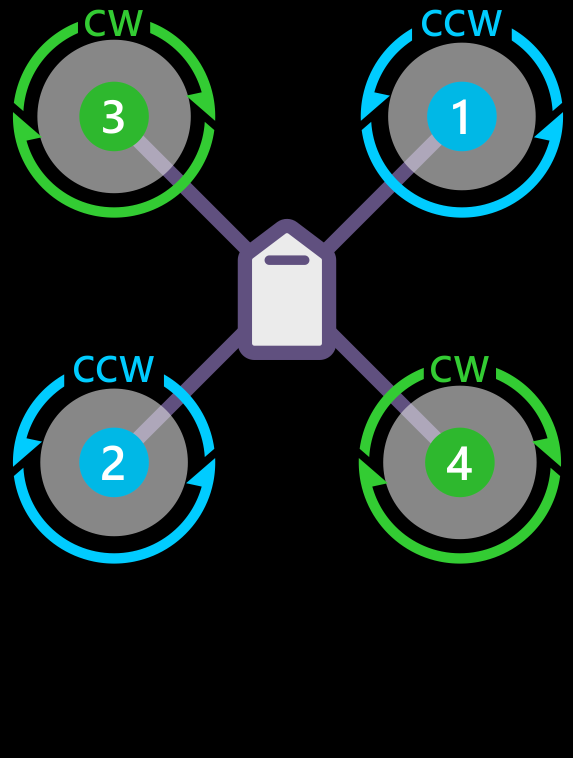
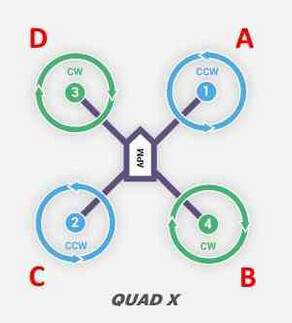
the motor test goes around in a circle starting with Motor 1 - 4 - 2 - 3.
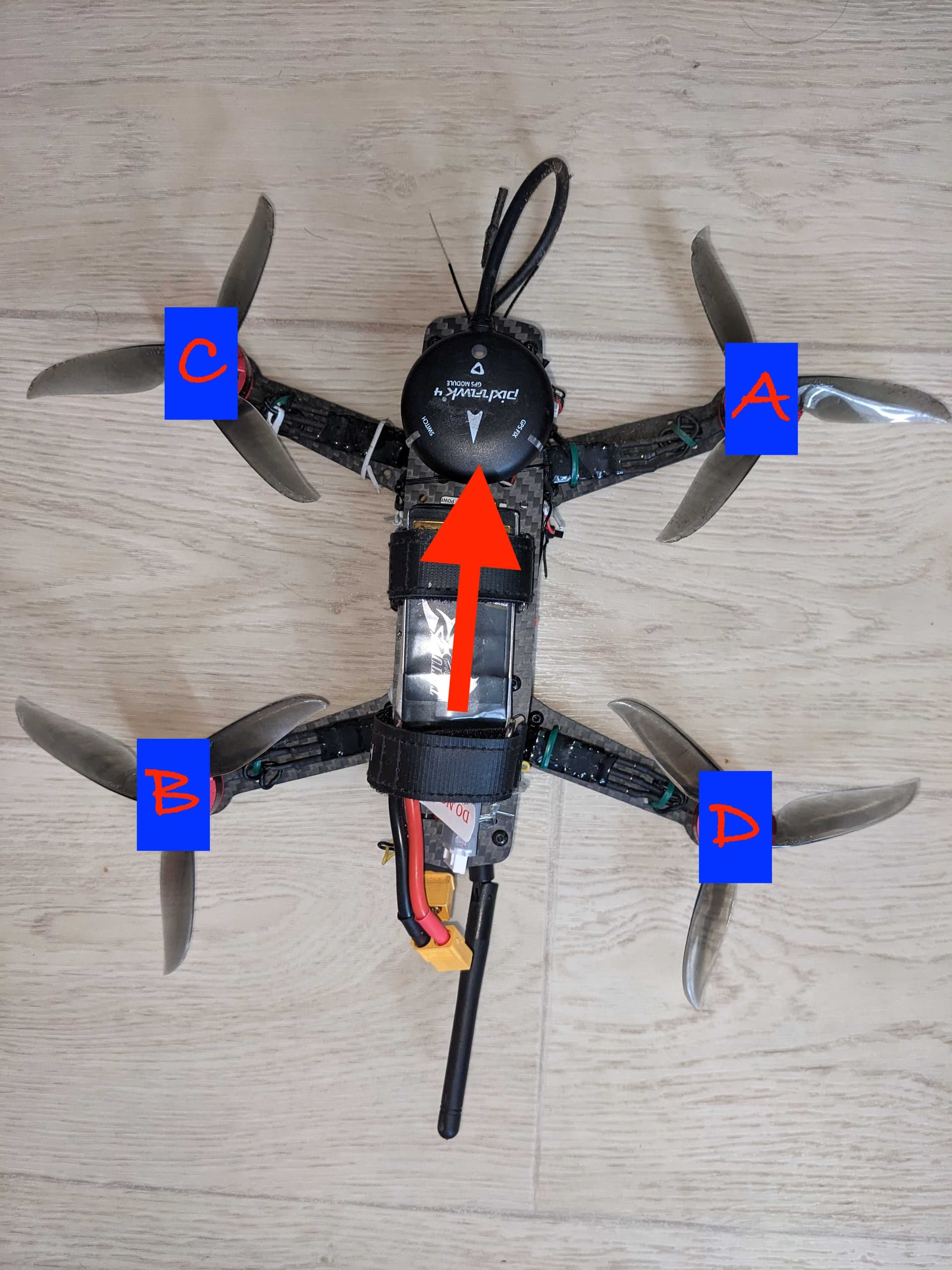
1=A
4=B
2=C
3=D
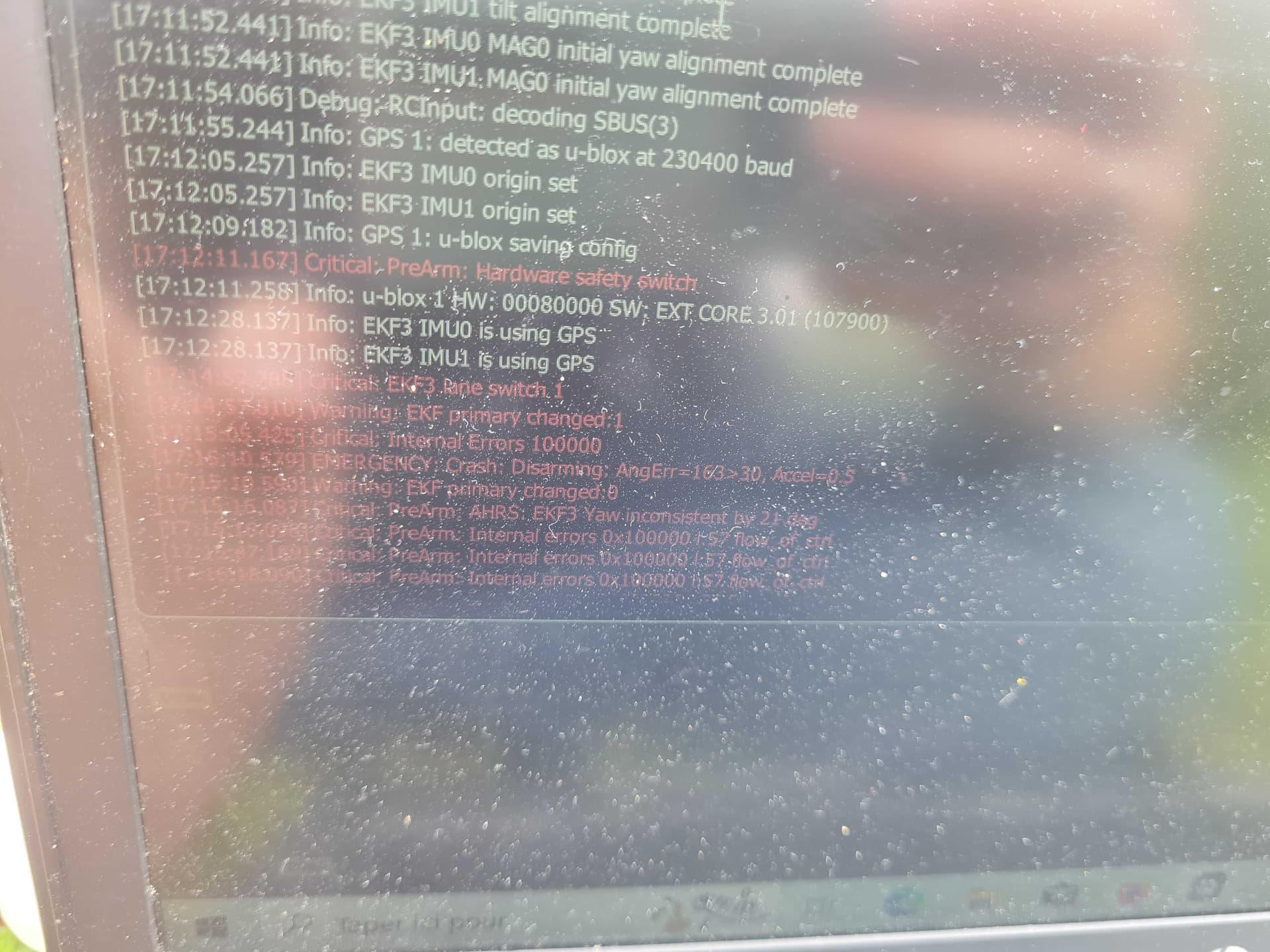
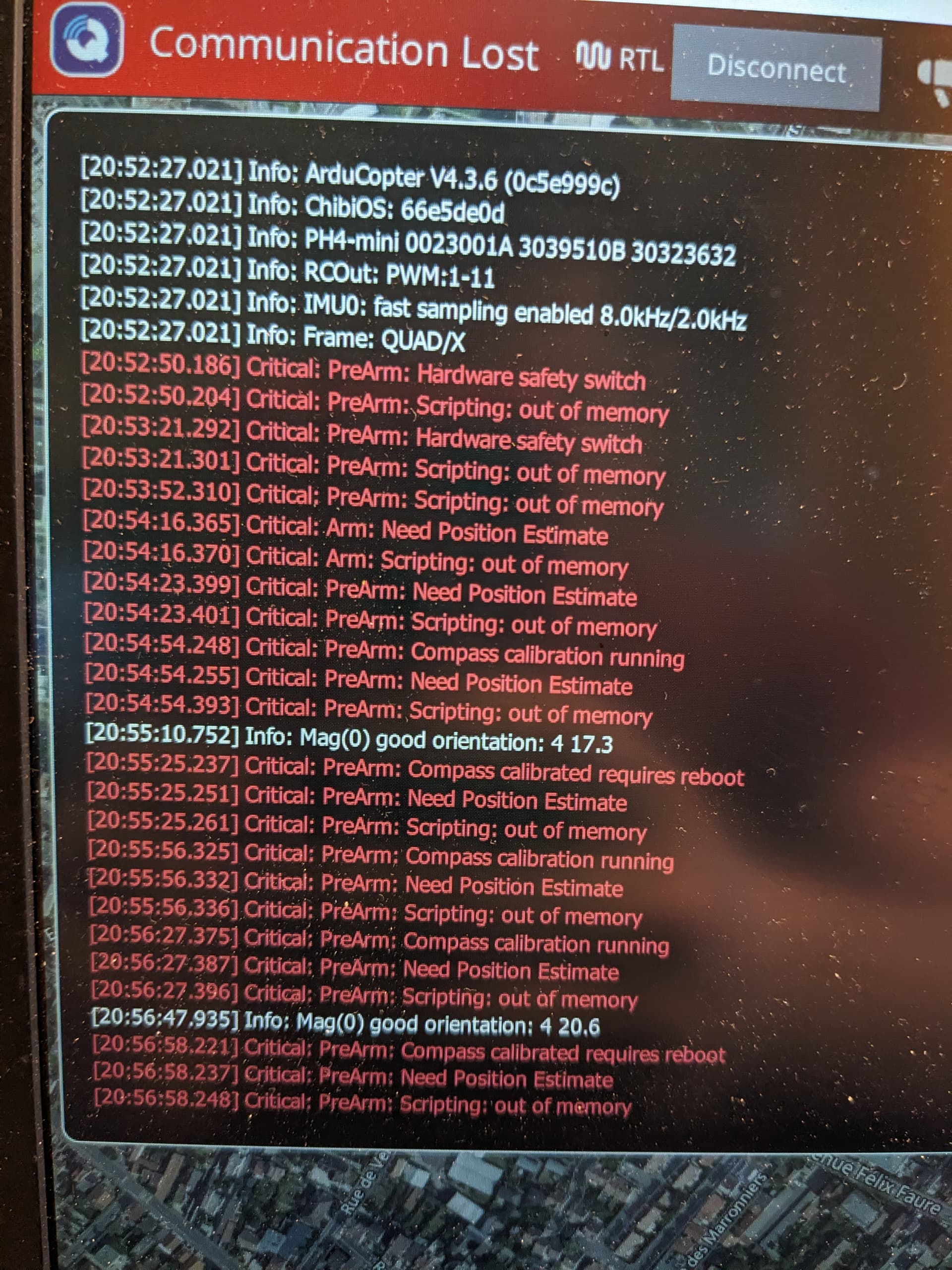
Also I cannot send you logs because there are no logs, I think because I have’nt put any SD card.
I’ve formatted a 8GB microSDHC with FAT32 and put inside, but when I open mavFTP there is just a folder @SYS but no LOGS folder
(I’ve tried to reboot the device, tried to set LOG_DISARMED to 1, tried to run test motors…)
Go into Full Parameter list or tree and set
FRAME_TYPE,12
for BetaFlight X
That way you wont have to change any wiring between the flight controller and ESC. Use MissionPlanner motor test to verify that the motors work in the correct order now.
No not quite.
The BetaFlight X configuration allows for the flight controller and ESC stacks where the wiring between the two is “fixed” by using a standard supplied cable, and the ESC orientation and motor wires are connected up for neatest most straight-forward layout.
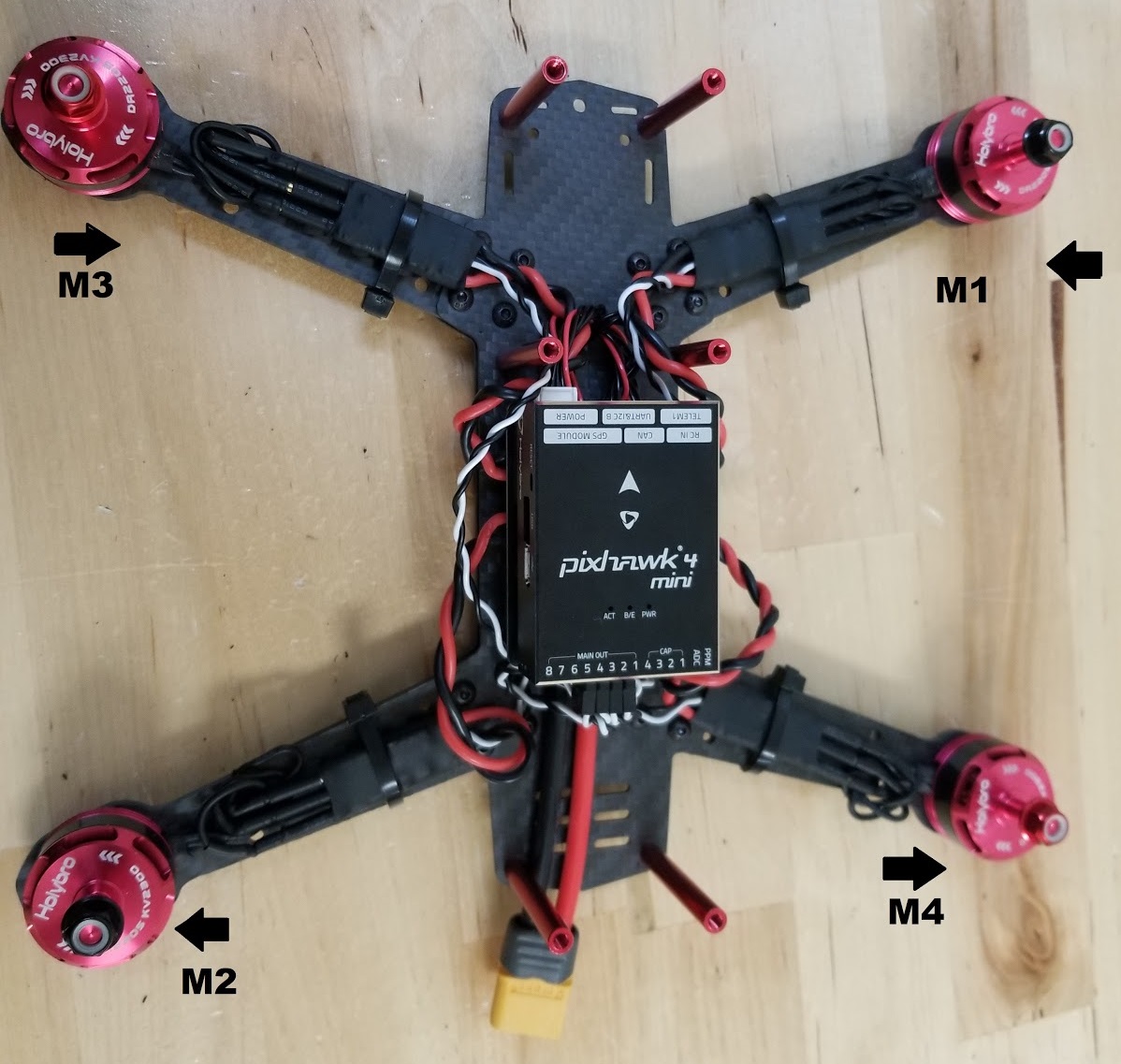
If you are using a flight controller where you can easily move the servo wires (like in your picture) then you can put this back to ordinary old “X”
FRAME_TYPE,1
and move the servo connectors so you have the servo numbers on the FC as per this pic and the motor test lettering should work out correctly
The trick with the MissionPlanner motor test is: no matter which copter or configuration you have (quad, hex, octo…) the motor test always runs from front-right around clockwise.
Why don’t you simply run Motor Test as suggested and then refactor the outputs until it’s right? Nothing to it.
Don’t use MavFTP, use the Log downloader from the Dataflash Logs tab. But, you don’t need to do it anyway it’s a basic motor order fix.
Hello,
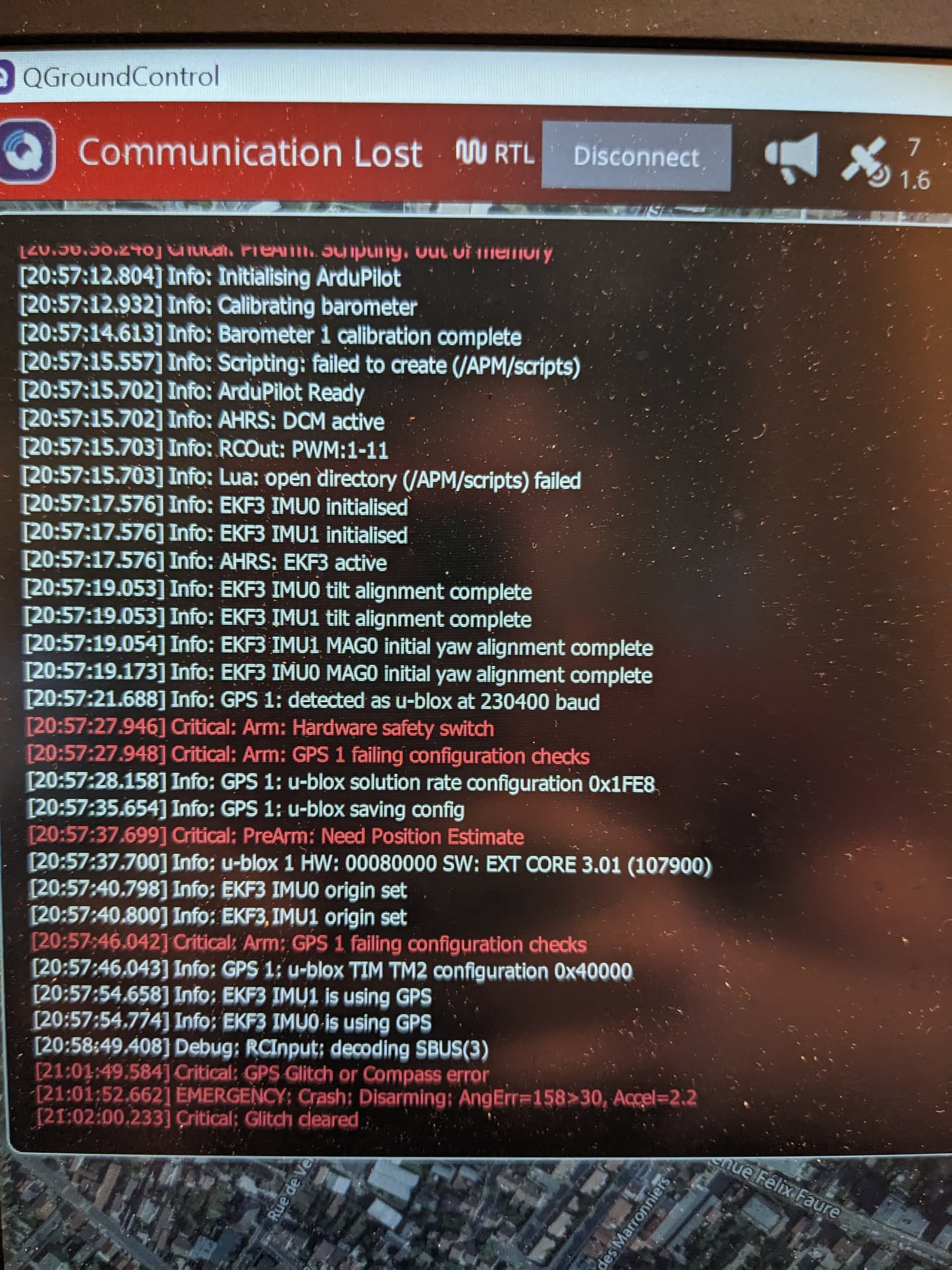
Propellers and motors are correctly configured, oppositely but takeoff test was done directly on my balcony and the building might have interfer with gps calibration. I’ll try in a more appropriate space with other people more qualified than me I’ll keep you touch after
GPS is not calibrated. I suppose you are talking about the compass. This needs to be done away from any interference like you are describing. In any case it will not cause a flip in takeoff. I would say your motor order is still wrong.