I’m trying to connect the RPM 2 on the Jet cat ECU v12.0 to the Pixhawk Orange in Order get the RPM from the engine. I’ve tried using the RPM1_type to GPIO and RPM1_PIN = 55 (AUX 6) but not able to get the RPM in the mission planner. And i want to know what type of signal is coming from ECU?. Do any one tried this before. pls do help me.
This is not a mission planner issue. This is an ardupilot issue. And you provide not enough details for us to help you.
Yes. Its not a Mission Planner Issue.
I trying to get the RPM from the Jet Cat ECU to the Pixhawk Cube Orange. Using the Aux (6)(GPIO).
Parameter Settings:
RPM1_type = 2 (GPIO) and RPM1_PIN = 55 (AUX 6).
But I only see -1 in the RPM1 variable in the workspace.
RPM2 is not an output, its an input for a second shaft speed ie turboprop application. You should go the canbus option and get all the data
Any Other Options without using CAN Protocol?. I don’t think ECU v12.0 supports the CAN.
The pro version does
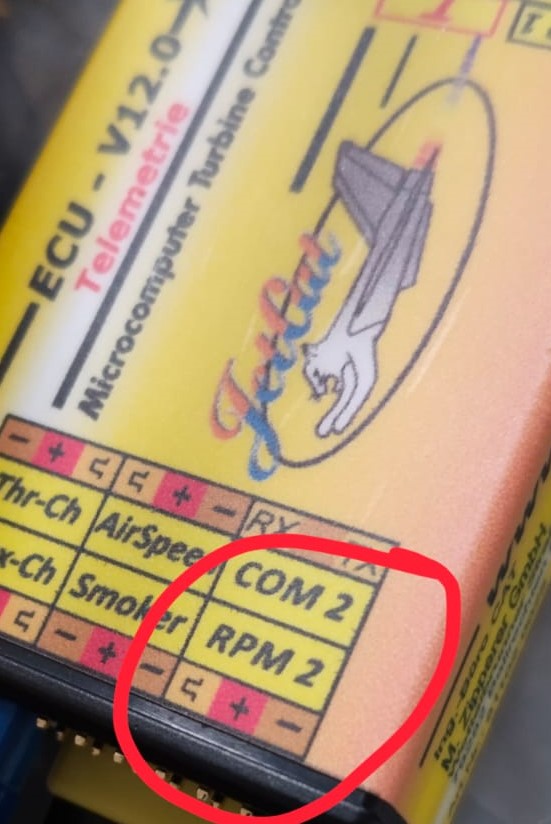
There’s is an option to get the telemetry from the ECU shown in the figure Symbol (T). But, I’m not sure about the connection to Pixhawk Cube Orange and get the data.

I am using a JetCat engine with a Pro interface that has an option to output engine telemetry via a CAN bus. I want to receive engine telemetry data on Mission Planner. I am running a Lua script that is added as a JetCat EFI driver but am unable to get data. I have connected the CAN cable from the interface to Cube on CAN2 port and the wiring is as follows,
Engine CAN High → Pixhawk CAN_H
Engine CAN Low → Pixhawk CAN_L
Engine Vcc → Pixhawk Vcc
Engine GND → Pixhawk GND
I am using a Here3 GPS connected to CAN port. I am speculating it is due to incorrect setting of CAN_D2_PROTOCOL and CAN_P2_DRIVER parameters.
Link for script - JetCat Driver
Has anyone tried the new JetCat drivers’ script and has it worked? Please help
This is my setup and it works!
ECU → Turbine Limits
Can-Ctrl-Address: 1
Can-Report-Address: 1
Can-Bus-Mode: Can 2.0A, 11bit
Can-Bus-Speed: 125kHz
I use Can 1 for gps and Can 2 for Jetcat
Auto Pilot
SCR_ENABLE: 1
EFI_TYPE: 7
CAN_D2_PROTOCOL: 12
CAN_P2_DRIVER: 2
CAN_P2_BITRATE: 125000
EFI_JC_ENABLE: 1
EFI_JC_CANDRV: 2
EFI_JC_TLM_RT: 1(or more)(optional)
1 Like
It would be appreciated if you could share your parameters or logs. I’ve been debugging it for a week with no success.