Okay it is 1:30am here (after midnight) tomorrow I will try your suggestion and keep you posted.
1 Like
Thank you very much for your help
Okay, here we go:
- I disconnect the radio from the little board.
- Connect the CUAV X7 to mission planner and make sure all settings are right.
- Disconnect ardupilot and reconnect after a few seconds
- After saving configs messages: change to GPS_AUTO_CONFIG=0 and GPS_SAVE_CFG=0
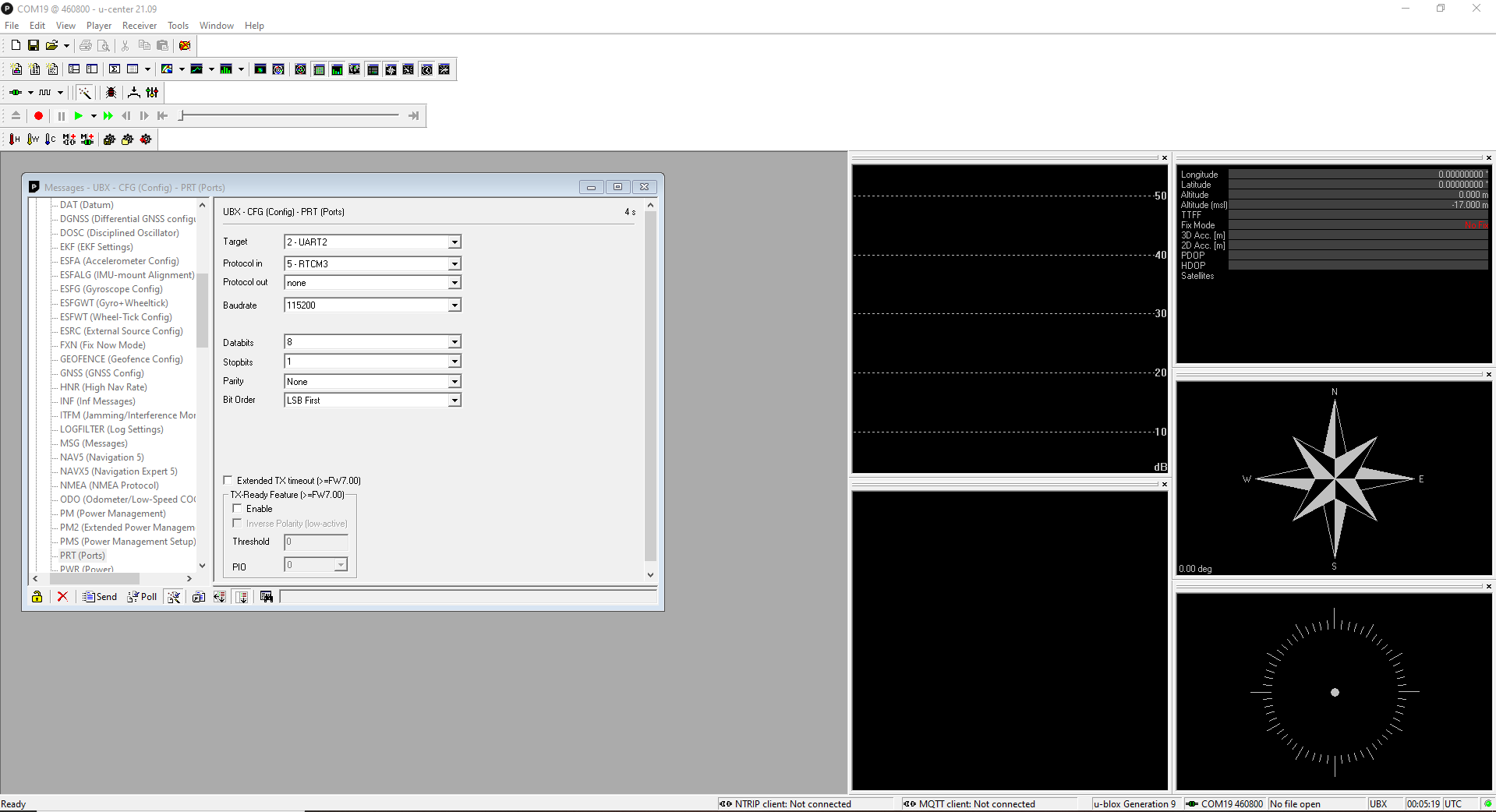
- Disconnect the ardupilot and take the little board, connect this board to u-center with baudrate 230400 it only connects with 460800 to my pc? and set: UBX-CNF-PORT UART2 to baudrate 115200 It already is 115200?
- Power off and reconnect pc to the autopilot after connecting the radio back on top of the little board and see if it works…
- Now wait 15 minutes to be able to receive RTK messages over the radio from the base station and see if gps yaw is working…
- Both GPS and GPS2 are rtk Float after 15 minutes of waiting
All of that sounds very good! The two baud rate inconsistencies aren’t very concerning - I may have made an incorrect assumption along the way, which should be inconsequential.
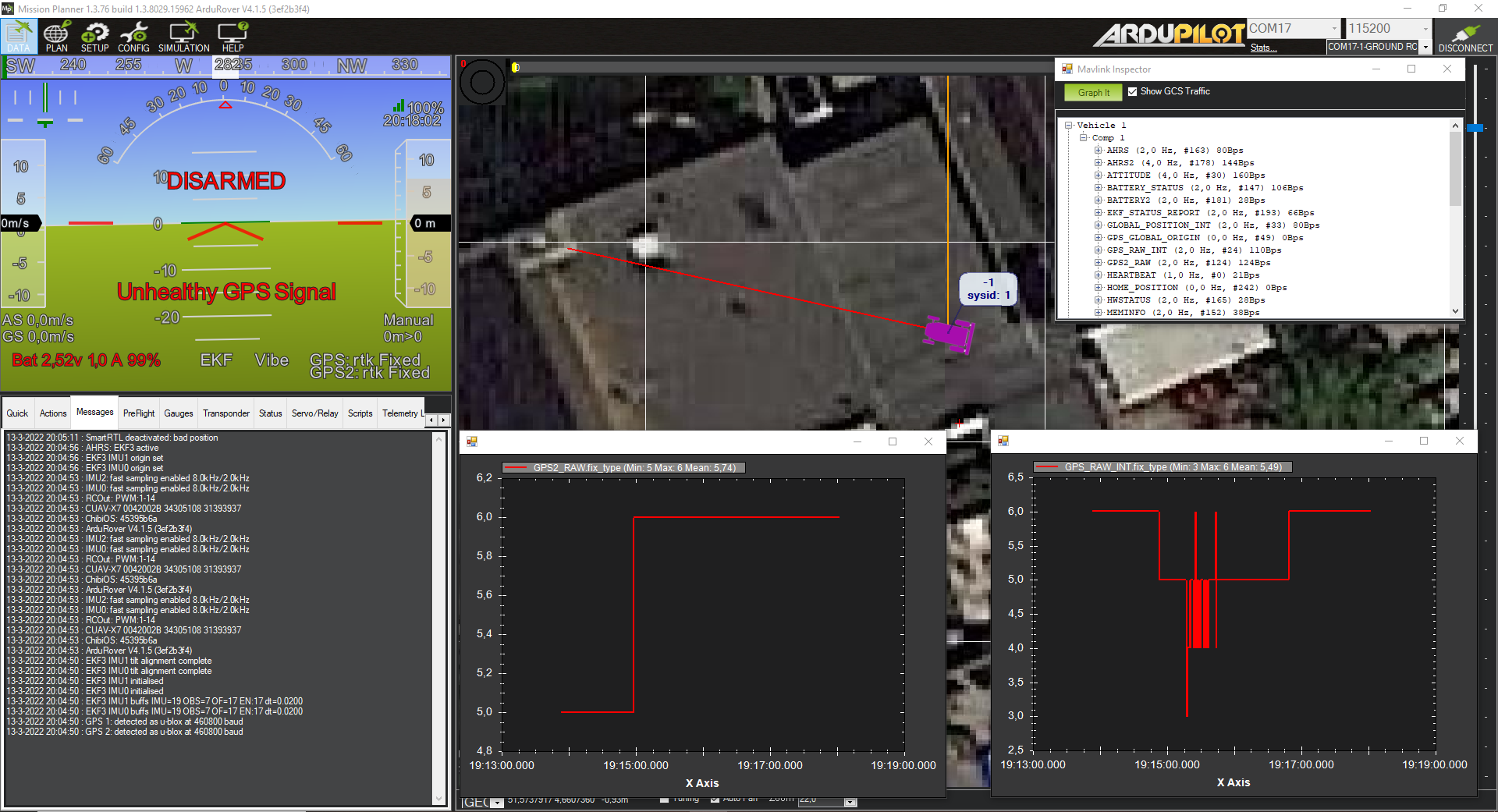
Is yaw working? Do you have any “Unhealthy GPS” warnings displayed in Mission Planner?
1 Like
Yes gps yaw is working, but I was still waiting for the GPS status to get to fixed, but that didn’t happen.
Well, if you have RTK-anything on both GPSs with yaw working, the configuration is almost certainly correct.
Make sure all of your antennas have a clear view of the sky, including the fixed base.
1 Like
I have connected my little board to u-center while also connected to the ardupilot.
Yesterday I could see some messages in UBS-RXM-RTCM statistics, but right now (on this little board) I don’t have the messages. I’m not sure if I tested this yesterday on the little board to or only on the big board.
Yes both are rtk Fixed now! I just moved the GPS satelites a little bit further outside (from our house).
I’m not getting the GPS-YAW at this moment, and I do get unhealthy GPS Signal
1 Like
Save a copy of your parameters and attach it to your next reply. I think we are very close.
1 Like
2022-03-13_gps_rtkfixed_no_gpsyaw.param (15.3 KB)
I didn’t change anything, but at this moment the GPS Yaw is back again ![]()
Those parameters look perfect. It seems maybe you’re having some issues unrelated to configuration (sky view, satellites overhead, signal interference etc).
1 Like
Okay ![]()
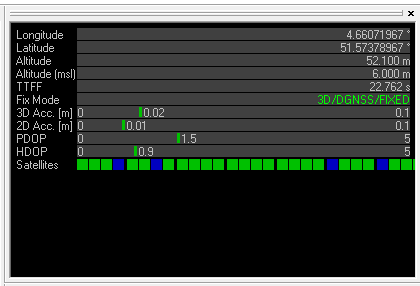
Is the 2D acc. [m] parameter for true horizontal accuracy in u-center?
The GPS yaw is not right at the moment, it is exactly 90 degrees wrong, this deviation stays the same when I move the antenna. Surely this is calculated by the GPS_POS parameters?
I’m very happy with today, tomorrow I’ll take these boards back to the rover and see if the GPS yaw and accuracy will be good as we drive the machine ![]()
Thanks again sir! I know it’s still early for you, but be sure to grab a beer tonight! Cheers! ![]()
Really glad you got things working this well so far.
If the yaw is off by 90 degrees, it sounds like your X (fore/aft) GPS_POS* offsets should really be Y (left/right) offsets.
Here’s a thread that describes the 2D/3D accuracy figures better than I can probably do myself:
Understanding the calculation method of 2D accuracy and 3D accuracy and its attributes (u-blox.com)
Yes thanks for the hint, I will validate this tomorrow in the rover machine
Hello Koen,
This week we will update the configuration files to fw v1.30.
Best regards,
ArduSimple Team
Is it normal to have to go trough all of this to have gps yaw working? Just getting ready to put it on my drone but i feel a bit nervous by all of this to have it working.
Probably will get the mosaic, curious to test it and looks a bit easier to setup. Price of Mosaic is almost double tough.
It’s not usually this frustrating. The ArduSimple heading kit with its Lite board can be difficult to troubleshoot. It’s not particularly well suited to ArduPilot in my opinion.
The SimpleRTK2B and SimpleRTK3B+Heading work really well, though.