Let me try and explain another convoluted method that works and allows you to keep the boards sandwiched together in the end:
NOTE: I have made multiple edits in rapid succession to these instructions. During my last revision, I followed this exact procedure to get things working.
First, physically separate the boards and connect each to the autopilot by following the ArduPilot wiki instructions. Connect the moving base (small board) to the first UART in order, and the rover (big board) to the second. I used SERIAL3 and SERIAL4, respectively on a Cube Orange. Use the following settings in addition:
- GPS_AUTO_CONFIG=1
- GPS_SAVE_CFG=2
- GPS_DRV_OPTIONS=0
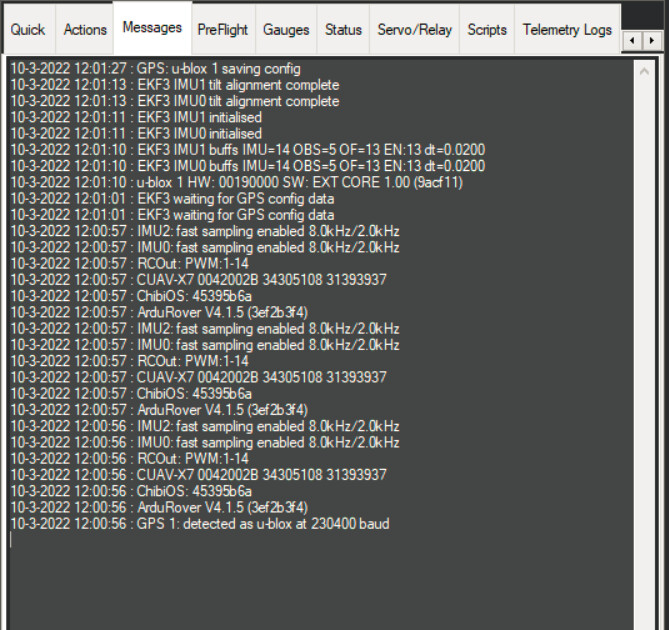
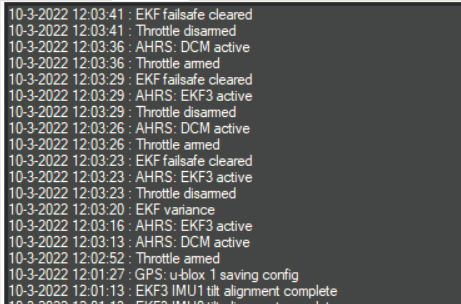
Power the autopilot on and let it auto configure both boards. Wait for these messages before continuing:
GPS: u-blox 1 saving configGPS: u-blox 2 saving config
This way we know we are using ArduPilot’s latest recommended configurations on both boards.
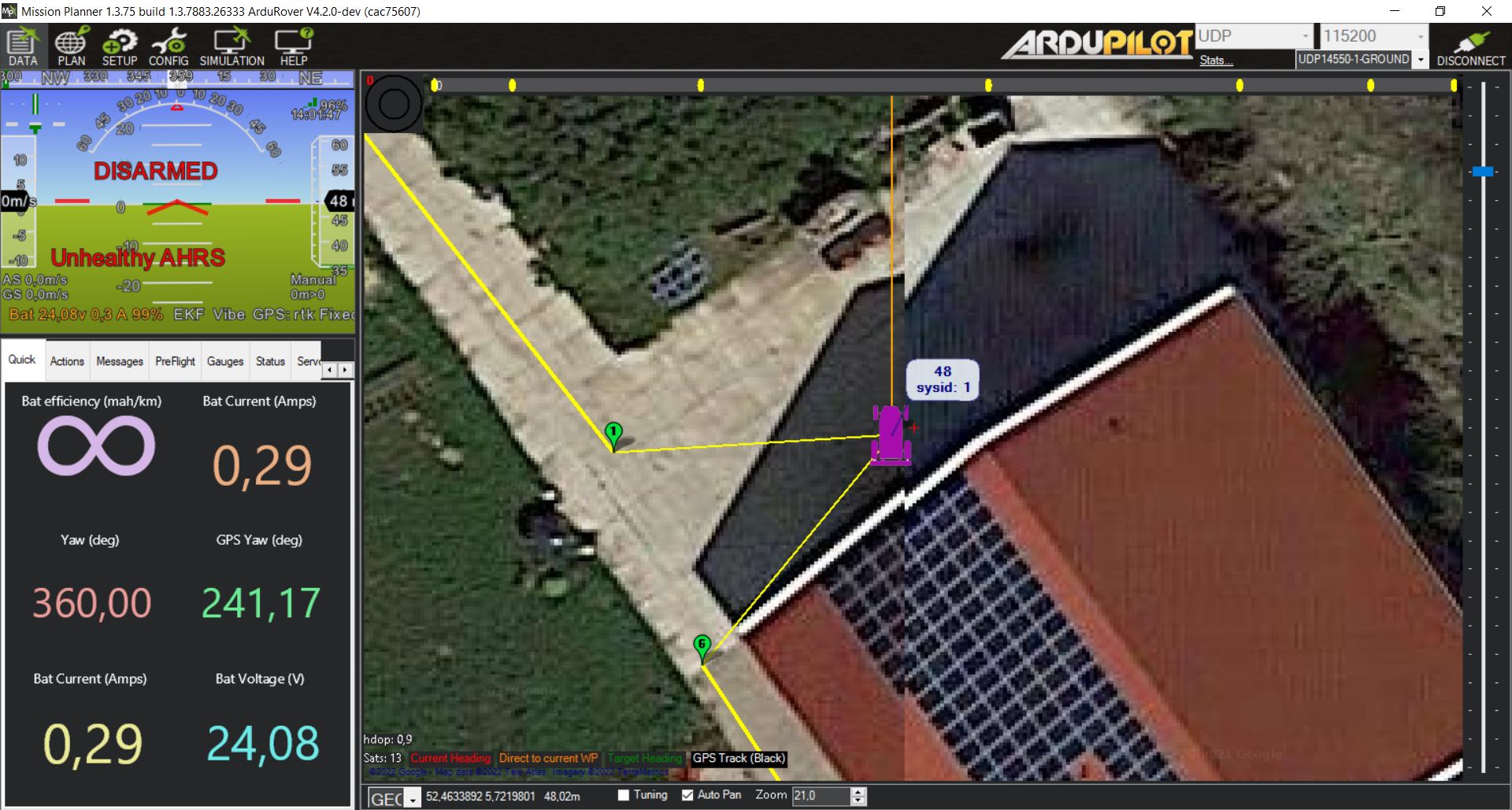
Confirm that GPS yaw is operational in this configuration.
Power the autopilot off.
Sandwich the boards together, disconnect the moving base (smaller board) from the autopilot’s UART and apply power. Set the following:
- SERIAL3_PROTOCOL=-1 (or the port where the moving base was previously connected)
- GPS_TYPE=0
- GPS_TYPE2=18
- GPS_DRV_OPTIONS=1
Leave all other settings as previously configured.
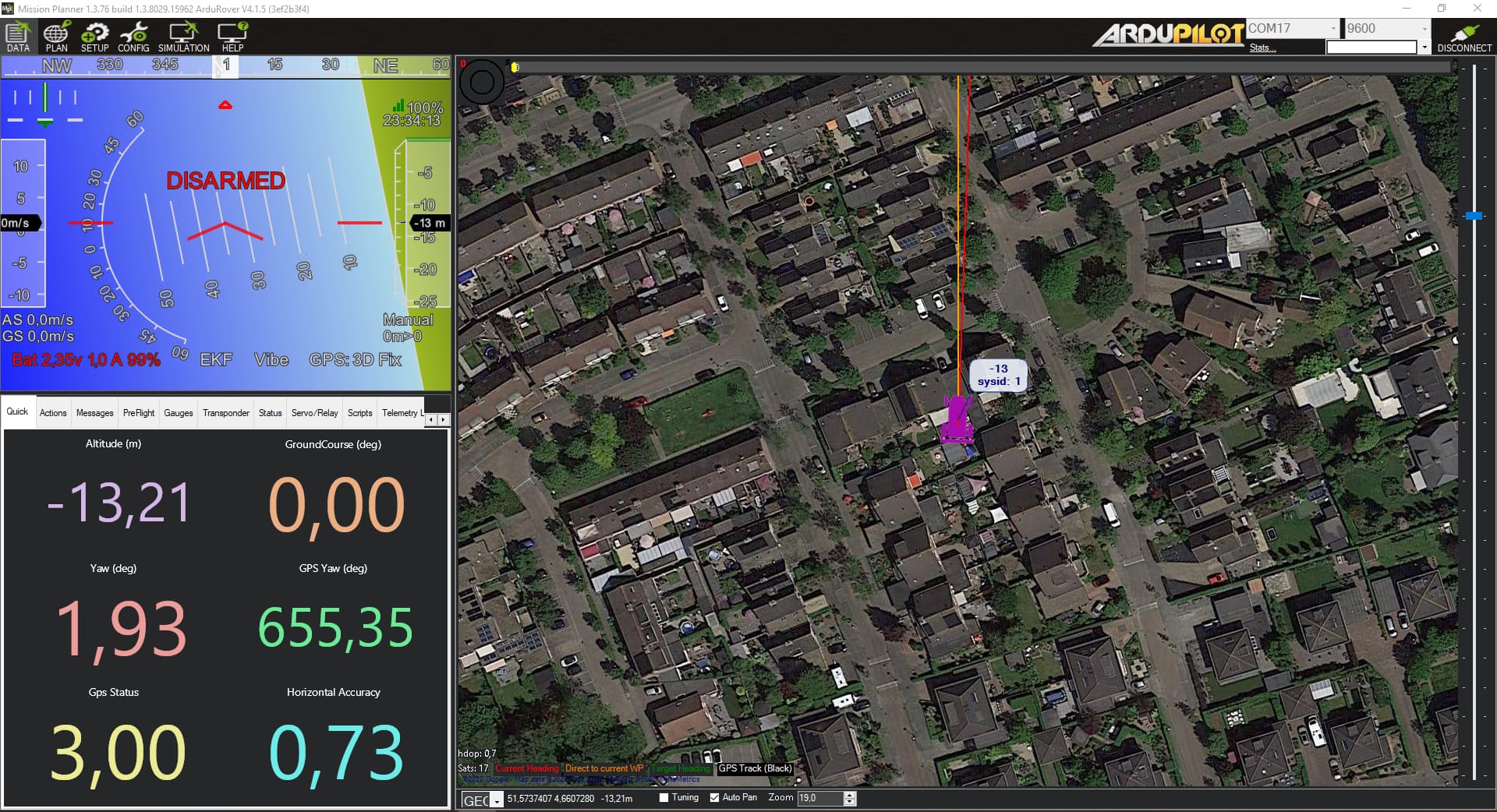
Cycle power again, and you should get yaw (with red GPS indications in MP because GPS1 is not present).
At this point, you can swap to:
Reboot again to eliminate the red GPS indications and warnings in Mission Planner. I have confirmed that this works, but wait until this point in my rather unorthodox instructions to do so (to avoid accidental reconfiguration of the rover). Cycle autopilot power and restart Mission Planner after making this change.
In this configuration, you should be able to inject RTCM3 to the moving base via the radio connections on the Lite (smaller) board. However, you cannot monitor it via the autopilot. The only connected GPS should almost always show RTK Fixed because it is the rover GPS receiving RTCM3 from the now disconnected moving base.
I certainly understand the confusion that might ensue by trying to follow these instructions, but you can avoid using u-Center other than to update the firmware, and the configuration that results should be very stable and compatible with ArduPilot.