My setup:
Pixhawk Cube Orange Plus
Arduplane 4.3.1
Mission Planner 1.3.77
Fixed-wing UAV (no RC receiver, only joystick for commands, no direct control)
Does anybody could give some advice, how to DISARM aircraft inflight? I was searching for this question on forum and documentation, but everyone is focused on the opposite problem “How NOT to disarm inflight”
My UAV is pusher with parachute, so my normal procedure is “Disarm then open parachut”. Everything was working on old Cube Orange (not Plus) and AP.4.1.0. After transfer to Cube Plus and 4.3.1 Disarm is not working from joystick (until aircraft is on the groud). Normal Disarm via Arm/Disarm button in MP is not working either, it asks about Force Disarm and only with this confirmation disarming the UAV. But it takes too long and operator should shift focus from UAV to the screen.
I was looking through the paramlist and have not found parameter that could enable inflight Disarm, but perhaps I’ve missed something.
P.S. Yes, I know that, in general, inflight DISARM considered to be not safe and not recommended. But for my purposes, with my procedures it is much safer (both for the crew, people around and the UAV) to make disarm while UAV is flying.
Thank you for your answer, but as I said, I don’t have RC reciever/transmitter. I could probably set buttons on joystick as DoSetServo instead of direct Arm/Disarm. But it will be very strange action from the developers to block one way of DISARMing (from joystick) and leaving another (RC switch), so I thought that this allowance for inflight DISARM should be configured somehow.
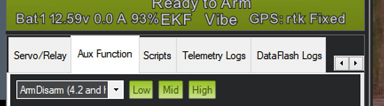
Ah, sorry I missed that. Have you tried the Arm/disarm Aux function in Mission Planner? It seems to work in The simulator but I just tried with Copter.
You might consider using a Lua script to detect the chute command and disarm automatically.
You could even potentially make it “failsafe” to stay armed if deceleration is not detected.
On the other hand, if the sequence is somewhat timing dependent, and you want to disarm before the chute is deployed, I think that is also entirely possible via scripting.
Chute options already disable motors, so you don’t need anything if you have set the rcX option to chute 3 pos. If in middle position (auto) and the chute needs to be deployed, the motors will stop.
Of course you can check that, by changing chute alt to 0, arm the plane, give a little throttle (remove props) then put the chute rc channel to high.
If everything goes well, the chute will deployed and the motor cut will kick in.
Check the messages tab, to check if everything happens as meant to.
Haven’t tried this option yet. Thanks, but I think this is not what I am looking for. The Ideal option will be to enable somehow the old logic with regular joystick commands. Hope the variant you suggested with changing Arm/Disarm commands to DoSetServo on Joystick, and configuring RC in as Arm Switch will work. Waiting for the weather to make a flight.