
The flight control is CUAV 7+ Asking the gods for help!
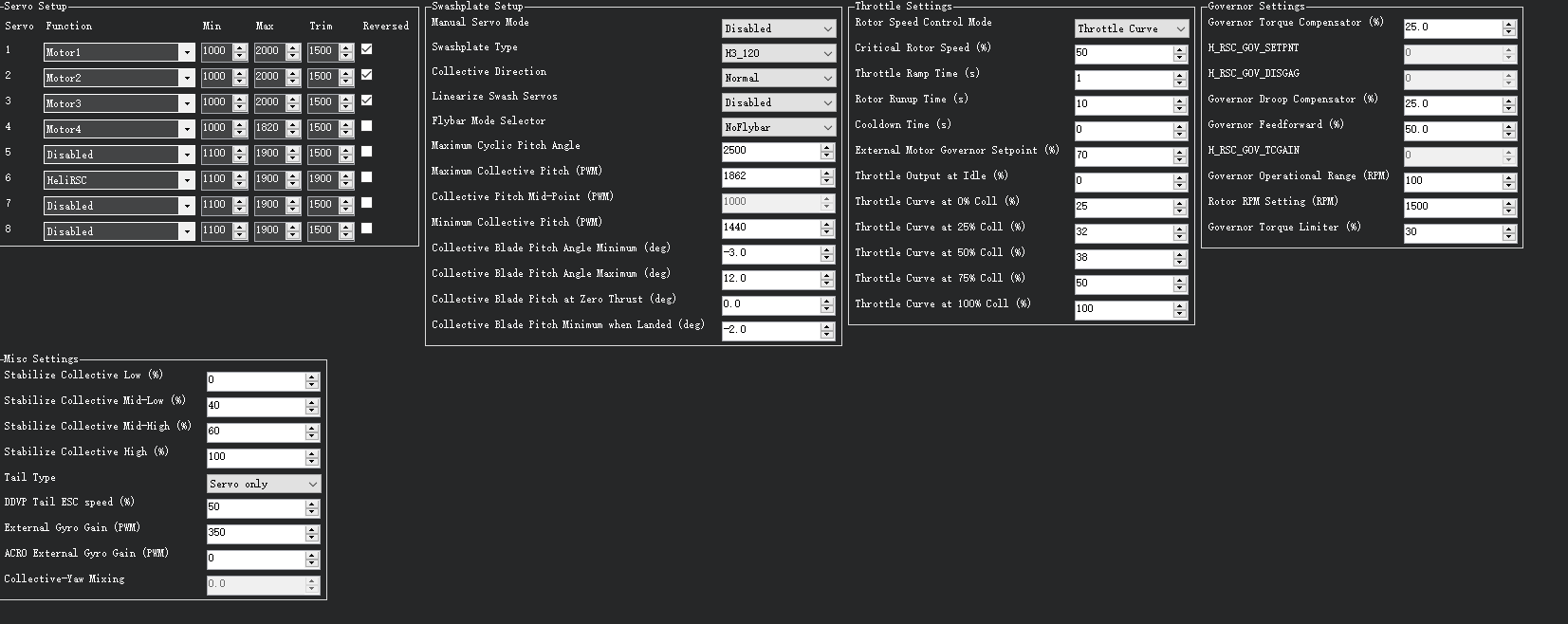
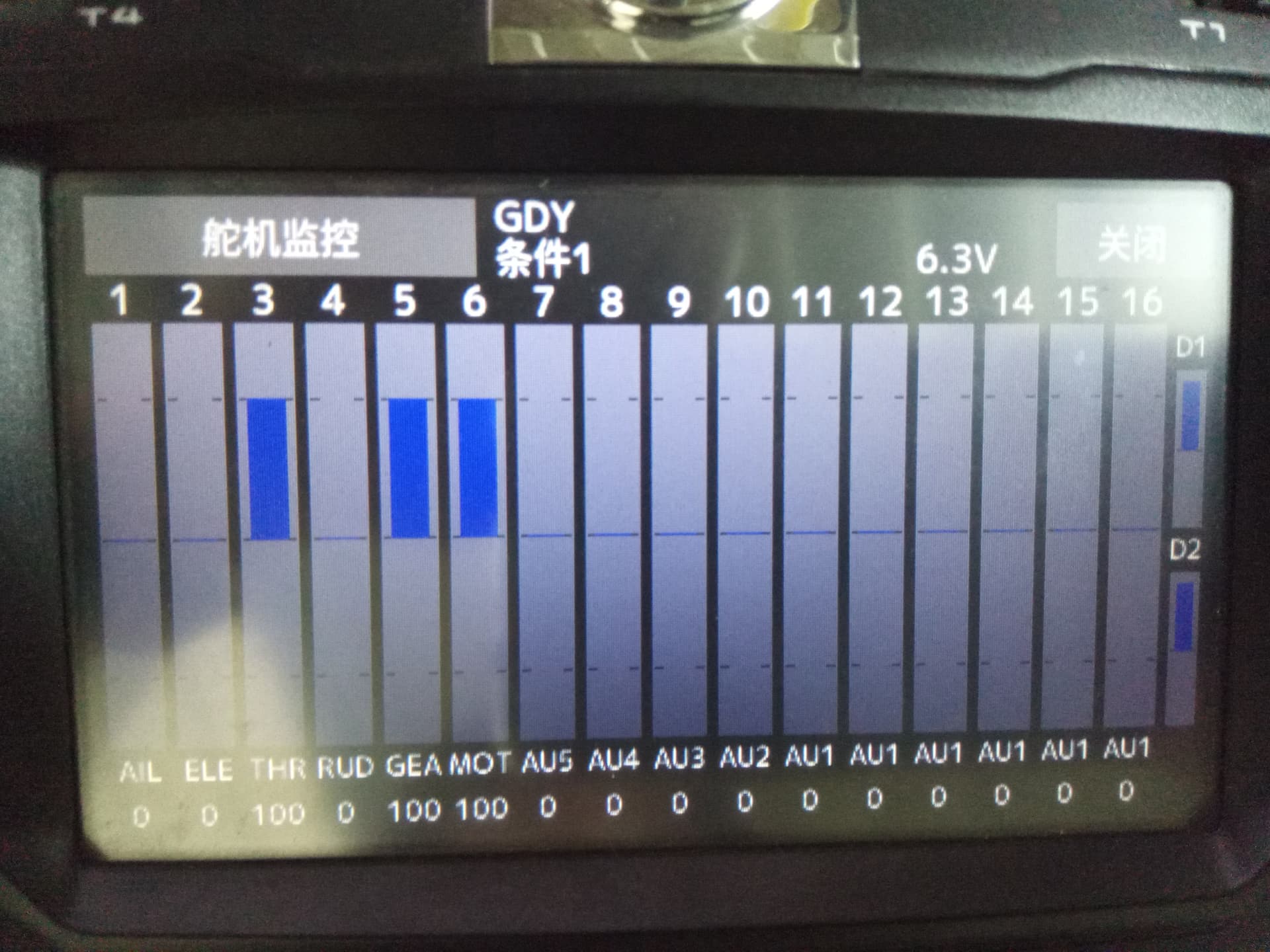
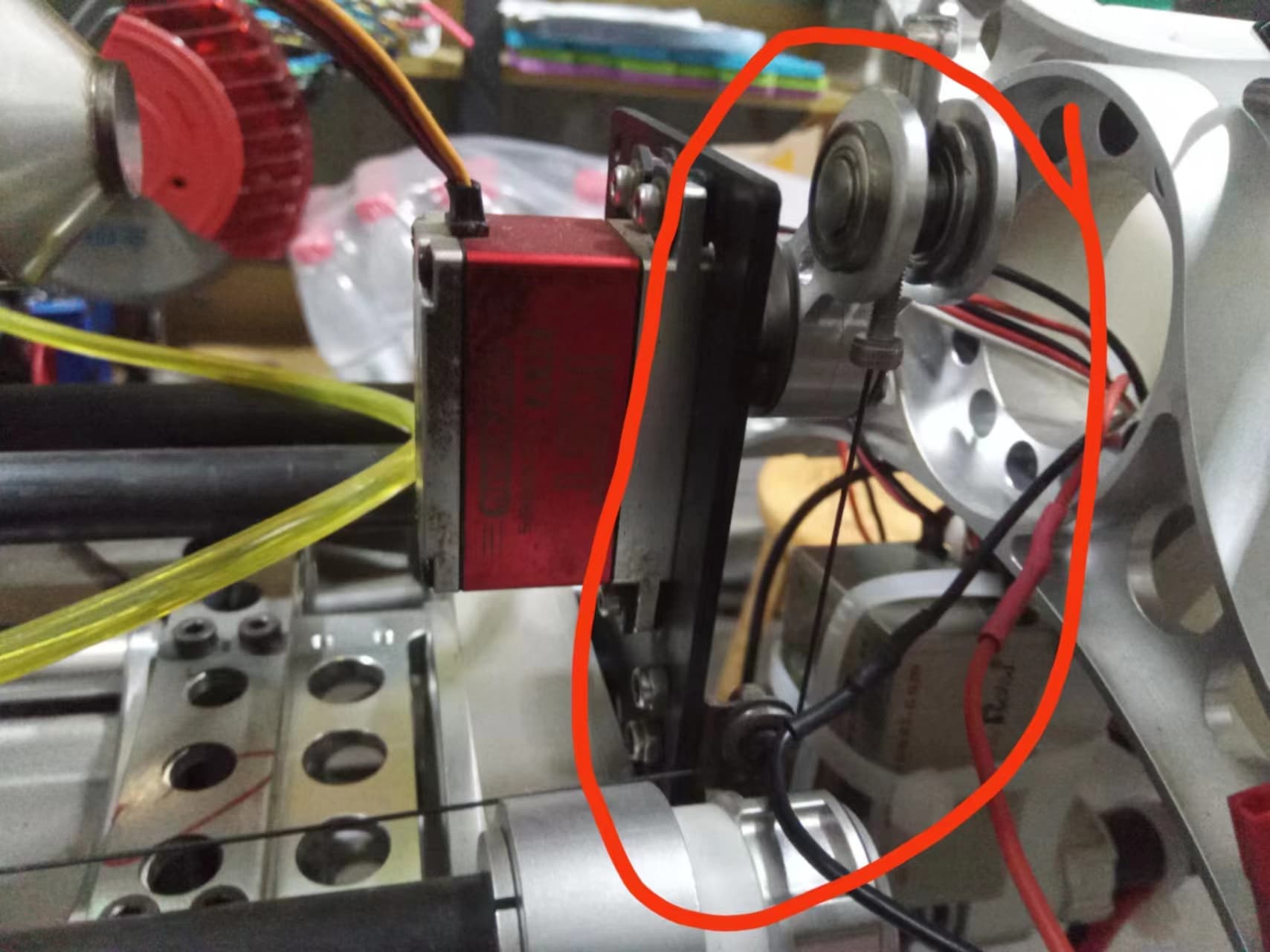
First, the direction of the swashplate servo has been leveled, and the channels set in the remote control have been adjusted to be consistent. Channel 6 follows the throttle of channel 3. The flight control wiring of the fifth servo carburetor is connected to channel 6. I am at the MP ground station. Also modified
Then I turned on the power, and what happened was that the carburetor servo suddenly reached its highest position. When I pushed the throttle lever, there was no response. It reached the highest position and could no longer be controlled by the throttle lever
Is the heli unsafed? By default PWM output is disabled. IIRC heli should be armed to allow throttle output.
Moved this to the traditional helicopter section so it gets more visibility by helicopter users.
This doesn’t sound right. There should be no mixing or reprogramming of channels in the transmitter. Arducopter handles the positioning of the servo connected to the engine carburetor. The RSC mode should be set to 3 and you have to set the throttle curve parameters. Channel 3 of the transmitter is the collective. What channel on your transmitter controls the motor interlock (turning on/off the engine)?
1 Like
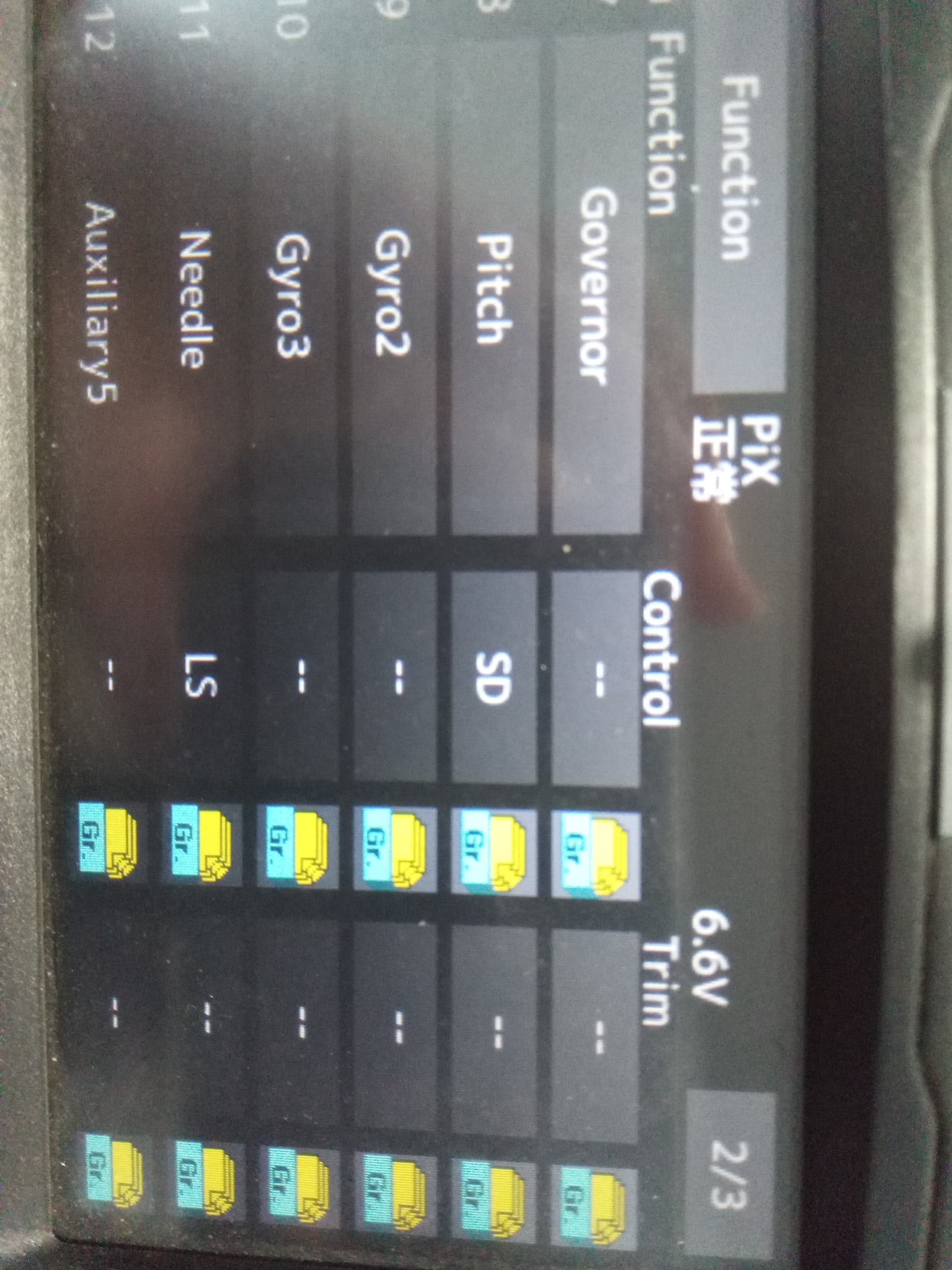
Hello, I set the throttle kill switch SF in the remote control, do you mean that the 3-channel throttle can’t be synchronized with the carburetor Heilrsc, can’t the Heilrsc be set to 6 channels, I tried to set the throttle kill switch, the energized carburetor servo still has no response, the model of my remote control is to use the fixed-wing model to set up the nitroelectric helicopter, must the helicopter model be used in the remote control to debug? Hello, I set the throttle kill switch SF in the remote control, do you mean that the 3-channel throttle can’t be synchronized with the carburetor Heilrsc, can’t the Heilrsc be set to 6 channels, I tried to set the throttle kill switch, the energized carburetor servo still has no response, the model of my remote control is to use the fixed-wing model to set up the nitroelectric helicopter, must the helicopter model be used in the remote control to debug? I don’t know very well, I watched the video on the official website to debug, but now to the last engine the servo will not be adjusted, and there is no response when the power is onI don’t know very well, I watched the video on the official website to debug, but now to the last engine the servo will not be adjusted, and there is no response when the power is on.
I set the throttle out switch in the remote control, and when I use the switch, the energized carburetor servo does not respond
The motor interlock is a part of Ardupilot and must be configured and set to high for throttle servo to move out of idle position.
If you still have trouble please enable LOG_DISARMED and post a log of trying to do the test.
Uploading: 问题.jpg…
Okay, I have solved the problem of unlocking the flight control. The carburetor servo can move. However, when I push the throttle lever to the maximum, the carburetor servo will rebound. Now there is a new problem. Do you know if the setting is correct? I set the pitch of the remote control to channel 8 and assigned a switch to the SD flight control to unlock it. I set it to J3 remote control flight control and it cannot be unlocked. Why is this? Did I set it up wrong?
A log file would be really useful for that.
Hello, is there a problem with the automatically analyzed logs or does it require a file with a bin suffix?
Log File C:\Users\lenovo\AppData\Local\Temp\tmpEB41.tmp.log
Size (kb) 3559.9990234375
No of lines 48625
Duration 0:00:00
Vehicletype ArduCopter
Firmware Version V4.5.0
Firmware Hash 53ad2c2a
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = WARN - Moderate change in mag_field (27.65%)
Max mag field length (584.66) > recommended (550.00)
Test: Dupe Log Data = GOOD -
Test: Empty = FAIL - Empty log? Throttle never above 20%
Test: Event/Failsafe = GOOD -
Test: GPS = UNKNOWN - No GPS log data
Test: IMU Mismatch = NA -
Test: Motor Balance = UNKNOWN - ‘HELI’
Test: NaNs = FAIL - Found NaN in CTUN.TAlt
Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - ‘FLOW_FXSCALER’ not found
Test: Parameters = FAIL - ‘MAG_ENABLE’ not found
Test: PM = UNKNOWN - ‘NLoop’
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data
The .bin file contains the information necessary.