Hi
I’m using Mission Planner for creating terrain following missions. This works fine and without any problems. The disadvantage is the need for a windows notebook on the field due to the fact, that Mission Planner runs only on Windows. A few weeks ago, I received the H16 radio from CUAV. The radio include a android system with QCG which is very nice.
Now I’m trying to find out how to create a rangefinder based terrain following mission. Can somebody help? I can change in the Takeoff command the MAV_FRAME_GLOBAL_RELATIVE_… TO MAV_FRAME_GLOBAL_TERRAIN_…
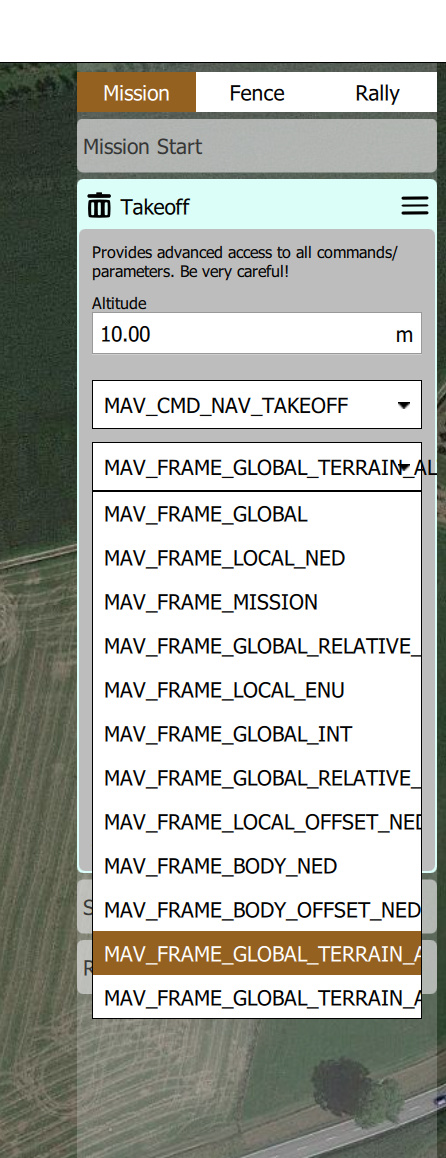
Is this the key to the rangefinder based terrain following?
Many thanks in advance
Michael