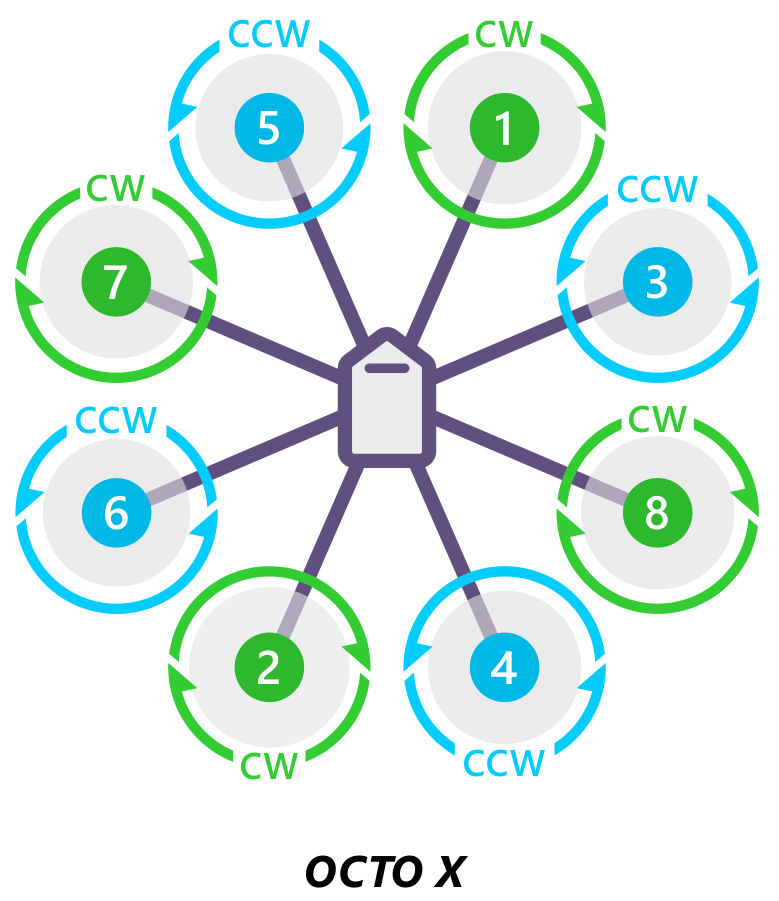
- case MOTOR_FRAME_TYPE_I:
- add_motor_raw(AP_MOTORS_MOT_1, 0.333f, -1.0f, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 1);
- add_motor_raw(AP_MOTORS_MOT_2, -0.333f, 1.0f, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 5);
- add_motor_raw(AP_MOTORS_MOT_3, 1.0f, -1.0f, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 2);
- add_motor_raw(AP_MOTORS_MOT_4, 0.333f, 1.0f, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 4);
- add_motor_raw(AP_MOTORS_MOT_5, -0.333f, -1.0f, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 8);
- add_motor_raw(AP_MOTORS_MOT_6, -1.0f, 1.0f, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 6);
- add_motor_raw(AP_MOTORS_MOT_7, -1.0f, -1.0f, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 7);
- add_motor_raw(AP_MOTORS_MOT_8, 1.0f, 1.0f, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 3);
- break;
- case MOTOR_FRAME_TYPE_DJI_X:
- add_motor(AP_MOTORS_MOT_1, 22.5f, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 1);
- add_motor(AP_MOTORS_MOT_2, -22.5f, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 8);
- add_motor(AP_MOTORS_MOT_3, -67.5f, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 7);
- add_motor(AP_MOTORS_MOT_4, -112.5f, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 6);
- add_motor(AP_MOTORS_MOT_5, -157.5f, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 5);
- add_motor(AP_MOTORS_MOT_6, 157.5f, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 4);
- add_motor(AP_MOTORS_MOT_7, 112.5f, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 3);
- add_motor(AP_MOTORS_MOT_8, 67.5f, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 2);
- break;
- case MOTOR_FRAME_TYPE_CW_X: