I’m using Pixhawk 4 (Firmware: Copter V4.3.6 Official), Holybro PM07-V2.3(Power Module) and SAVOX servo(Connect to FMU-PWM-out). I can control servo rotation with remote controller.
If I don’t use remote controller and let servo rotation when Pixhawk 4 tilting. How should I do?
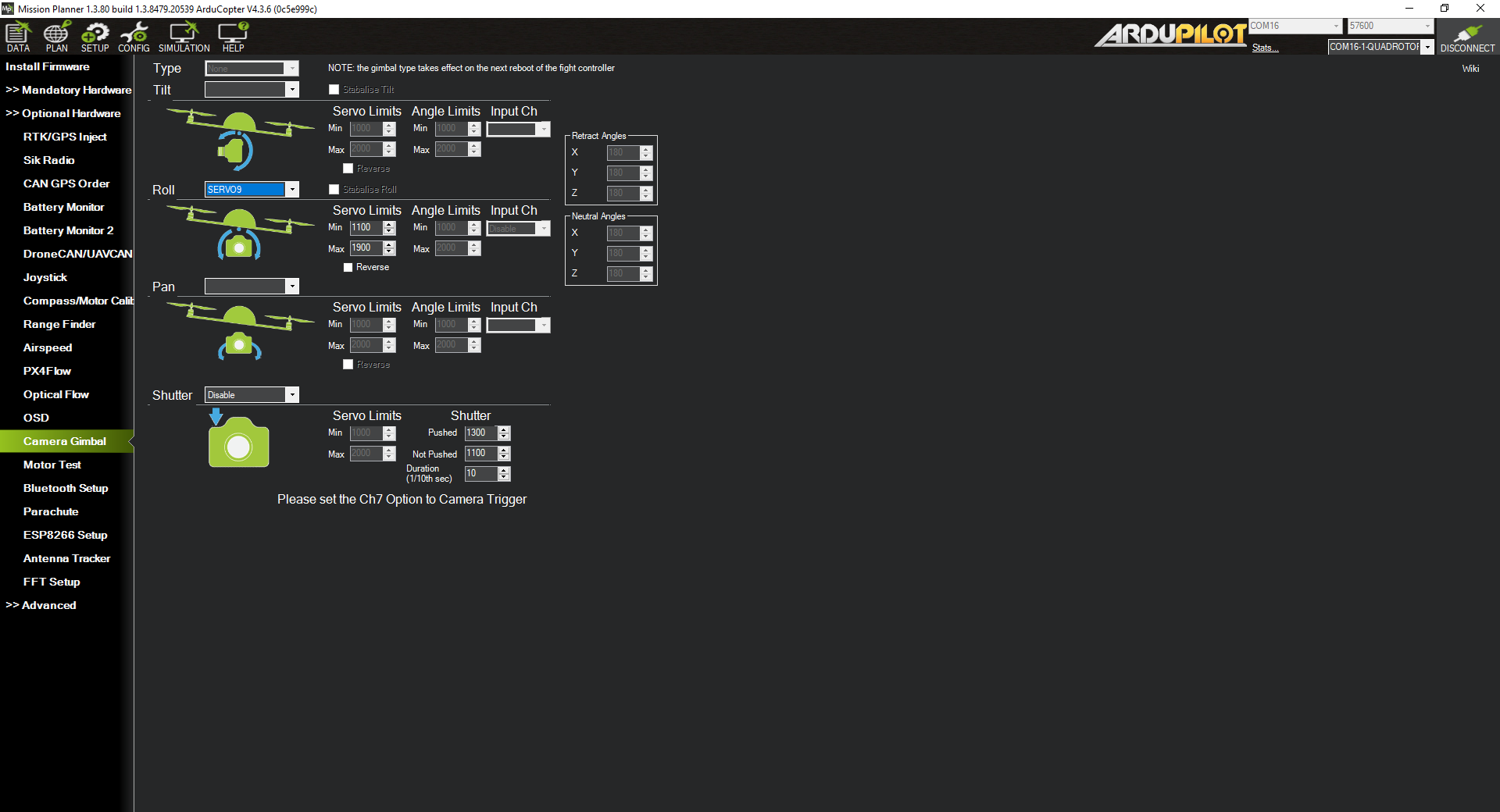
The fc will control the servo based on its assigned function. The remote control input is only used as the input for the manual flight mode. Are you trying to make a gimbal?