Dear Adrupilot community,
I have the problem that I do not know how to connect the servo motors for aileron, elevator and rudder to the Pixhawk.
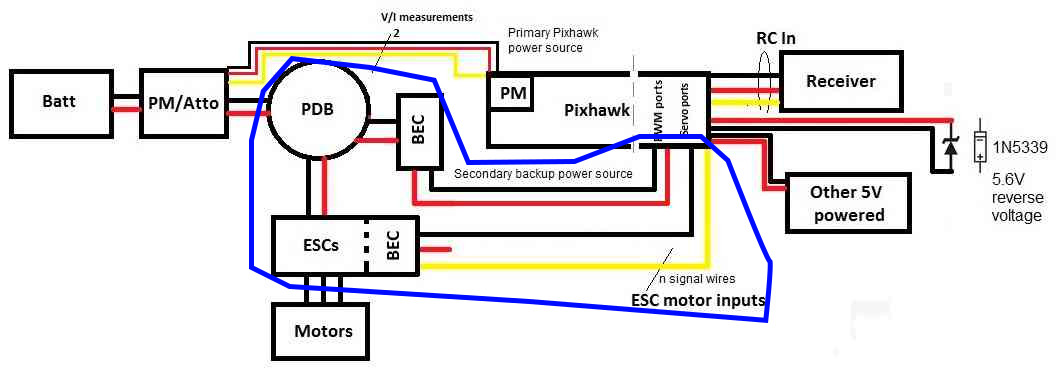
I found this picture which doesn’t really help me. The problem I have is that I do not know how the servo motors get their energy since only the signal cable is supposed to be connected.
But from my understanding the servos not just need commands, but also energy to move.
Also I have my throttle only connected to the Pixhawk viat the ESC. Is is possible to fly like that or do I need to connect it to the Pixhawk somehow?
My build currently looks like this (No aileron, elevator, rudder attached yet):
The receiver is an FrSky R-XSR.
Thank you for that link, I have never seen this sub page before.
Now, considering this picture from your link, can I change my setup in the following way?:
Replace the weird construction between the camera and the Pixhawk, which is also taking the BEC with a tuffwing cable, which doesn’t need the BEC plugged into it.
Put the now free BEC into the pixhawk and therefore power the servos and get a signal to the throttle?
(So I connect the camera not to the AUX ports.)
Or is this not possible and I need a 2nd BEC coming from a PDB?
Also, I do not need a 2nd energy source, or do I?
I am sorry for so many questions, but the link to the detailed explanation gives me a 404.
Your BEC plugs into any unused Main or Aux Out port.
This will power the bus.
Usually the camera trigger is just plugged into RC9 (Aux1)
ESC’s just use the gnd and signal wires into the Output
Servo’s just plug into the outputs, all three wires so they get their power from the BEC
All powered by the BEC, so make sure your BEC is up to the current required.
And don’t forget the Zener died to protect the flight controller if the BEC goes over voltage.
I think the confusion is arising because you are using the BEC in your ESC to power things.
That generally is not a good idea as most ESC’s produce very noisy power which you do not want in your Pixhawk.
It may be sufficient for the servo rail however.
Circled in blue you notice the red wire (+5v) from the ESC is cut.
This is more important for multi rotors where you will have multiple ESC’s and you do not want to connect the BEC’s together (Can cause unpredictable things to happen).
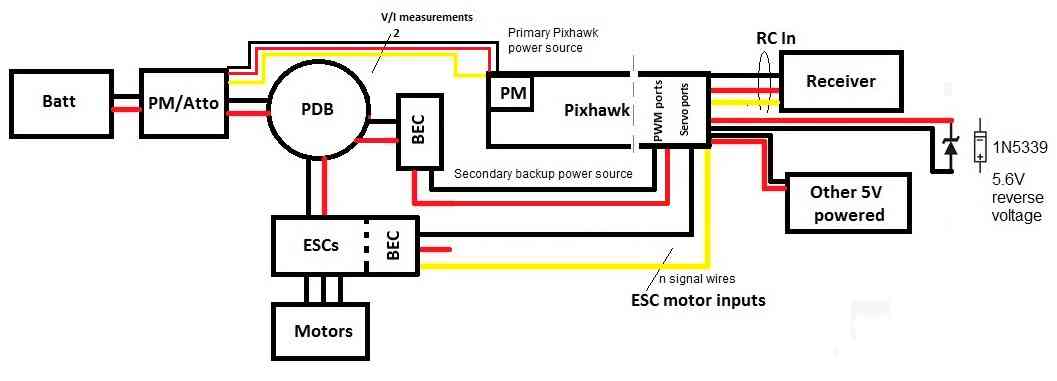
So getting your setup:
I would run the ESC to the throttle out port of the Pixhawk.
This will power the servo rail.
Just plug your servos into the correct output port and they will be powered from the ESC’s BEC.
Same for camera.
2 points to watch:
Use a Zener diode on the output rail as described in the documentation so you don’t fry the Pixhawk if that BEC in the ESC fails or goes over voltage.
Make sure the BEC in the ESC can handle the current required by the servos.
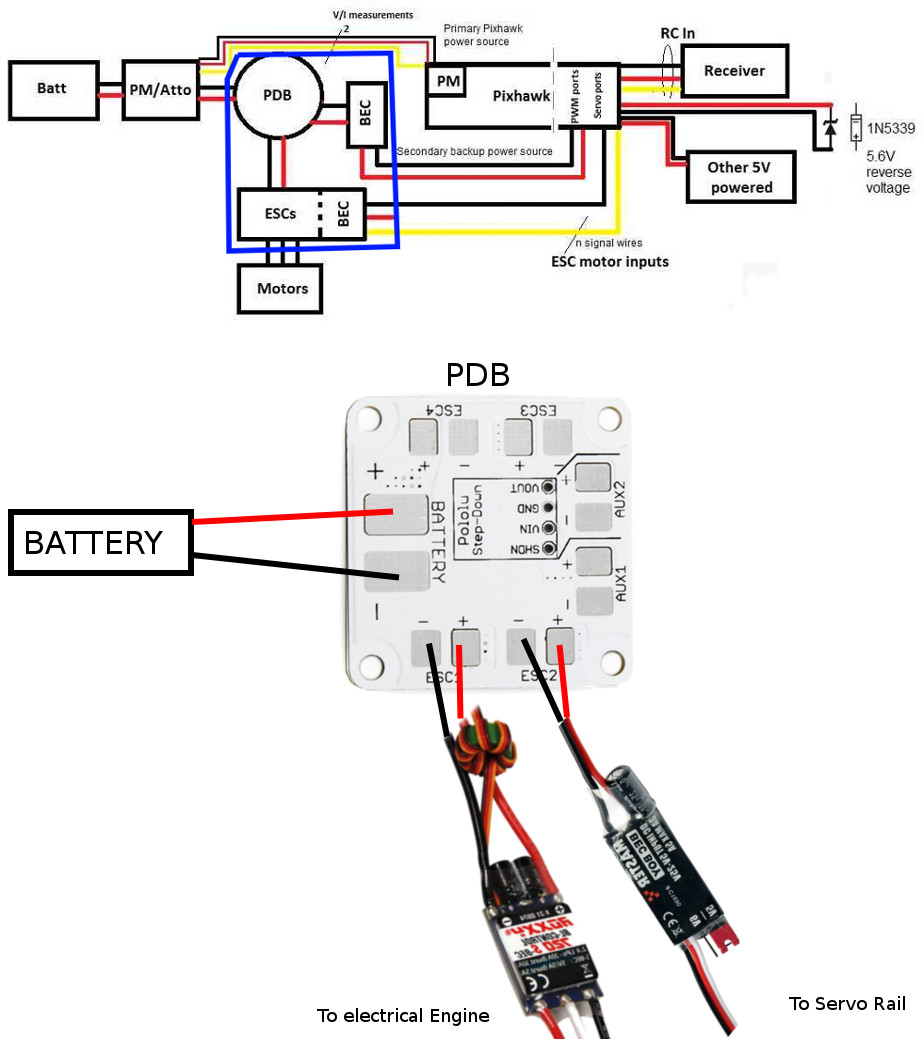
Alright, so I got this PDB and this additional BEC.
As far as I understand it I connect Battery, ESC1 and ESC2 on the PDB.
I am planning to use ESC1 for the Propeller engine and ESC2 for the PixHawk.
I do not need to use a Polulu Step-Down for powering the PixHawk, since the BEC is already putting out 5V the whole time, or do I?
Well, according to the Picture further up I need two BEC.
The PDB is connected to the battery, the ESC+BEC to the engine and the BEC to the Servo rail.
I made a picture that hopefully explains what I try.
I am talking about the party in the blue box.
My question is, if it is correct to connect the BEC going to the Servo rail to the PDB like this.
I have to connect 5 cables (4 servos and 1 engine) to the PixHawk.
However I read everywhere there are just 4 channels for the control.
Ailerons have 2 seperate Servos. How do I connect them to the PixHawk?
Do I have to buy a Y servo wire, like this one here?
Or can I assign two channels for the ailerons?
I did not have to buy a servo cable.
It is possible to give two Servo outputs on the PixHawk the same Aileron message.


{kind=link}
{kind=link}