The forum software appears to drop the final period in your link.
People wanting to follow the link can manually add the period at the end or follow this link.
Certainly, I would prefer them instead of substituting the electronics, but here what is all about are four wheels vehicles, without needing balance (may be I am missing something).
Not exactly. On the hoverboard the two plates rotate one in respect to the other from human action, and the side boards translate this into movement. Above the plates are fixed, and the FC moves the motors (human action outside (TX radio)).
I’m using the dcf887b dewhalt motors, they are brushless motors, a very good motor to use in a rover, but I still haven’t found the right way to use it, could someone help me with some esc, in I could adapt it with power control with the controller
Is there any esc on the market so I can make an adaptation like they do with the hoverbord
it would be a great idea to use the drill’s own esc, but I believe that the tension would damage the controller, could someone help me with some adaptation
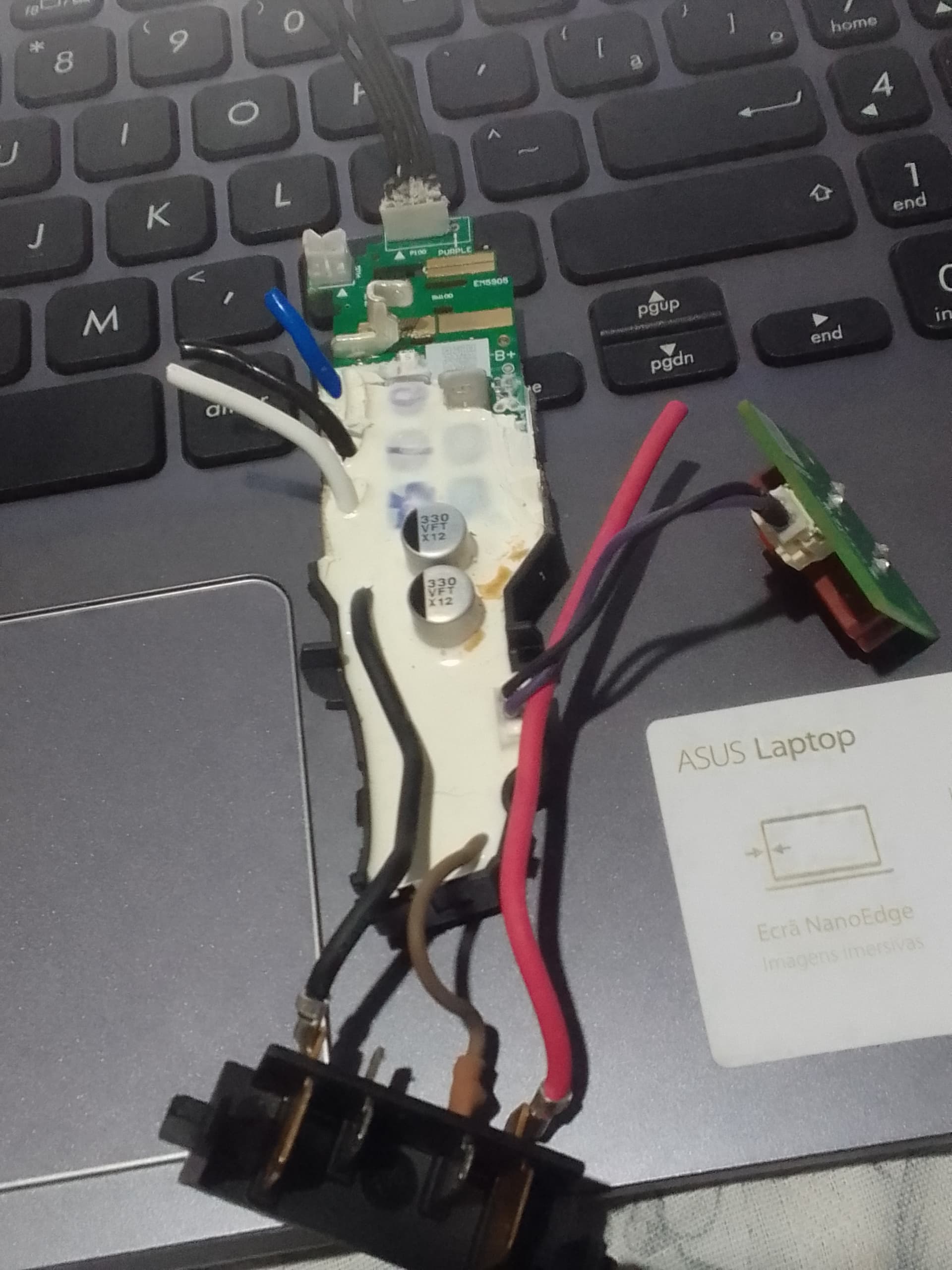
Here it is, pending a better setup:

in the case of your project, you had to make some adjustments to the hover’s motherboard to communicate with Pixhawk ?
All the electronic parts were substituted, as if building an ArduRover.
I think you will need a digital interface like a lua serial driver, it will give you much finer control with no deadzone as your setting the values directly, it should give better control for a balancing application where you need very fine control, pwm isn’t a great interface for that.