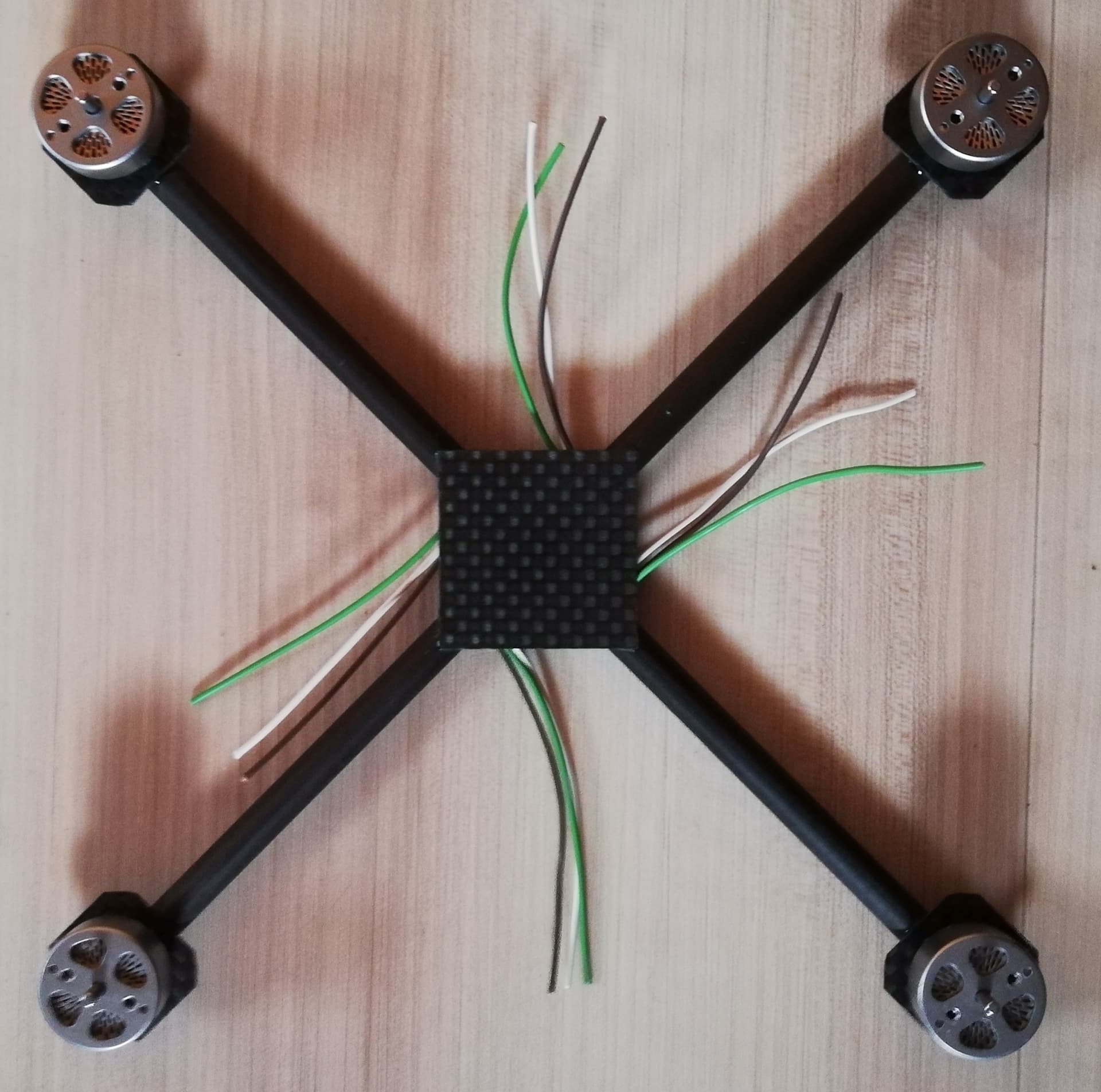
I was having issues with vibrations, it turns out it’s the motor torque flexing the arms, by turning the IMU filter frequency down to 20hz I could tune it out, but by adding some 1mm carbon rod as bracing it stopped it completely with less than 1g of additional weight.
I have also added the optical flow and lidar for loitering indoors.

5 Likes
Hello,
and a big thank you for this very detailed build description.
I’m currently rebuilding your design and it’s almost finished.
@geofrancis
Do you mind sharing your parameter file ?
1 Like
twiggylatest2.param (1.5 KB)
Can I add that to the ArduPilot methodic configurator software under GPL3 license?
If I’m not total wrong your parameter file is not complete, it’s only 78 lines.
Can you please upload it again …
the rest wont be applicable to your quad.
Here is my attempt for a 250g 1 hour quadcopter. Frame, motors, ESC and FC are as described above.
It’s not as weight optimized as described in this build because I just used some parts I had already lying around. So my takeoff weight (including everything except battery) is 79g.
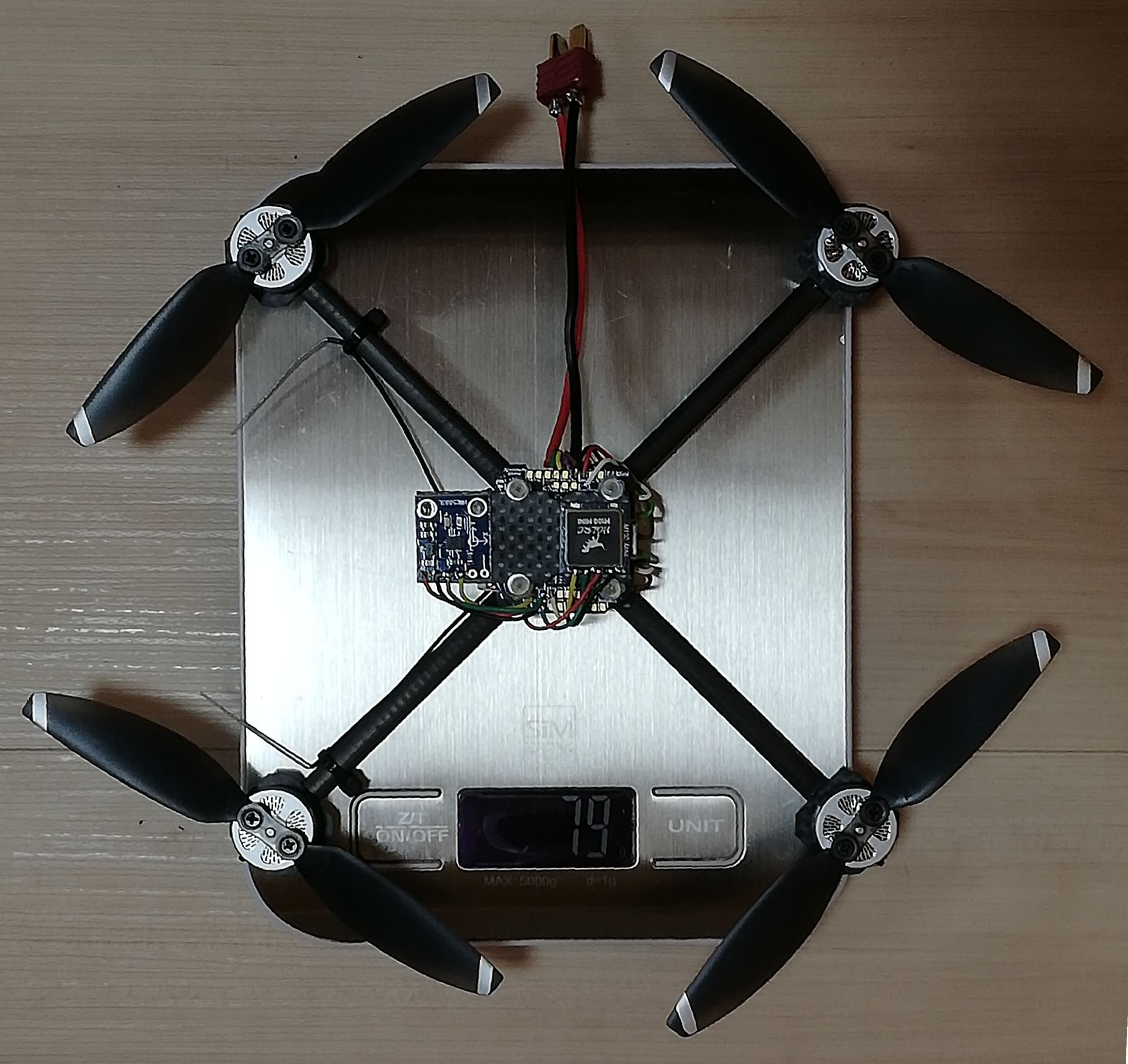

Everything’s ready for maiden flight now …
2 Likes
You will probably need to add some bracing, 1mm carbon is what i used.
Thanks for your hint. I’ll report back once I got it into the air …
if you try and fly it with those settings without bracing it is going to shake violently.
I have made a mini quad inspired by your work,and have the Sunrise Cicada 6A BLHeli_S 4in1 ESC that you use. I cant connect to the esc using blheli suit or blheli configurator.
I have a Holybro Kakute F7 and KAKUTE F7 AIO fc. I connect usb to the fc. I have a motor
that is turnig the wrong way,and have no acces to solder the cable at the moment.
Maybe it’s not possible to configure the cicada 4in1 6A?
it should work normally, i ended up flashing mine to bluejay to get BDSHOT.
Ok I will see if I can find any solution to it.Thanks for reply
After some small modifications my copter is finally ready and flies very smooth.
I added 1mm carbon bracing (reduced the vibrations by a factor of about 2), but in my case the key to really low vibrations is damping the flight controller by using homemade dampers using “taica alpha gel”:
https://composite-point-shop.de/taica-alpha-gel/

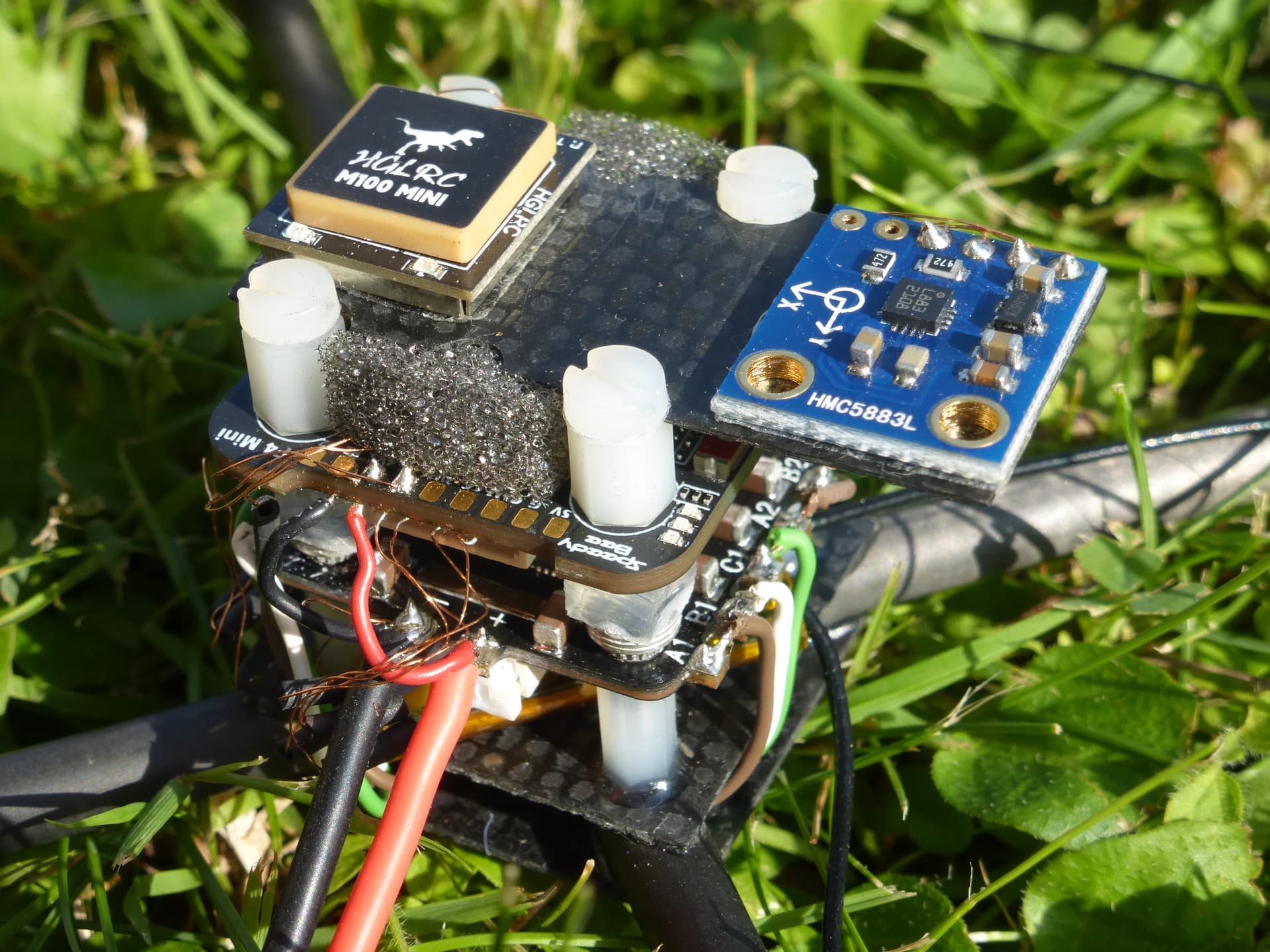

This material is almost like jelly and very effective (in my case it reduced the vibrations by a factor of about 8).
Here is a screenshot showing vibrations during hover and some moderate flying:
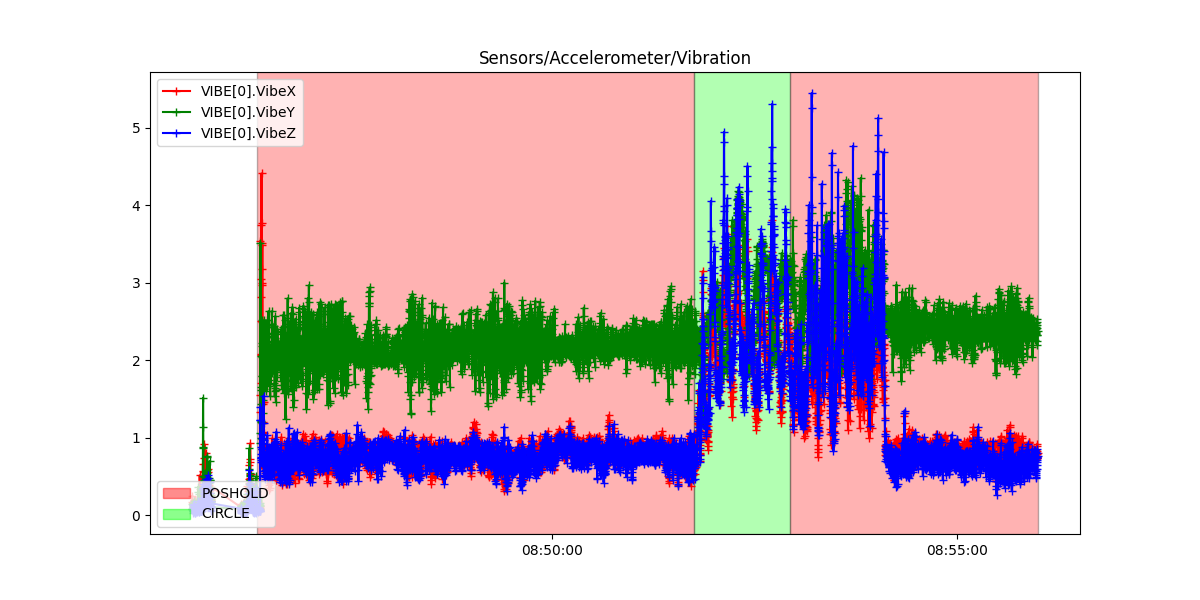
It would be interresting to see a comparison to yours.
It was also able to set slightly higher PID values:
ATC_ACCEL_P_MAX 300000 (you 287899)
ATC_ACCEL_R_MAX 300000 (you 287899)
ATC_ACCEL_Y_MAX 60000 (you 31500)
ATC_ANG_PIT_P 15 (you 14)
ATC_ANG_YAW_P 10 (you 4.5)
ATC_RAT_PIT_P 0.1 (you 0.07)
ATC_RAT_PIT_I 0.1 (you 0.1)
ATC_RAT_PIT_D 0.003 (you 0.0013)
ATC_RAT_YAW_P 0.5 (you 0.18)
ATC_RAT_YAW_I 0.05 (you 0.018)
ATC_RAT_YAW_D 0.001 (you 0)
ATC_RAT_YAW_FLTE 4 (you 2)
ROLL values are identical to PITCH
Flight time is 45 minutes (mostly hovering and some moderate flying) using two old 3200mAh cells.
The charger showed 2681 mAh afterwards, this results in 60 mAh/minute.
Takeoff weight is 181g (copter 83g, batteries 98g).
I already ordered 5000mAh cells to see how long it flies.
In theory the magical 1 hour should be possible …
Thanks for sharing your ideas and inspiration !
3 Likes
I was finally able to check flight time using 2x 5000 mAh batteries and got following results:
Flight time is 56 minutes (mostly hovering and some moderate flying)
The charger showed 4533 mAh afterwards, this results in 81 mAh/minute.
Takeoff weight is 225g (copter 83g, batteries 142g).
Capacity increased by 69% (2681 → 4533 mAh)
Weight increased by 24% (181 → 225 g)
Flight time increased by 24% (45 → 56 min)
To be honest, I’m a bit disappointed and expected way more.
I have only one explanation:
The additional weight of the batteries makes the whole system VERY inefficient.
1 Like
55minutes is about right for a 5000mah cell, I say that in the build guide.
you could save some weight by reducing the battery wire guage and changing the connector to a bt2.0
The 6000mah cells will give you 20% more capacity for a small amount of extra weight that’s how I got over 1 hour.
I explain at the start that propellers get less efficient the more load that is on them, so when you used the much smaller battery it got much more efficient. But you lost flight time due to it having less energy. So it’s a balance, you want to add as much capacity with as little weight as possible to keep the efficiency.
1 Like
there was some years ago a simple paper with some simple math which exactly was on working out the effect on flight time of increasing battery …
maybe someone here remembers that paper and could share it, might be interesting for you
(tried to google but didn’t find it on the quick)
EDIT: found at least this, haven’t checked it but might be reasonable. The curve looks at least so. https://www.instructables.com/How-to-Get-Best-Flight-Time-for-Quadcopter/
2 Likes
Thanks for your answers, it’s logical to me …
@geofrancis can you share your vibration values as I showed above ?
i dont have any of the logs, they were lost when i had to wipe my computer.
Can’t you just do another short flight ?