I want to add an external IIC/SPI MPU6050 to pixhawk2.4.8 how do I do it, do I need to change the firmware code? Or if I change to another IMU is it possible to plug it in and use it.Thank you for your answer!!!
I’ve plugged in the mpu6050 on top of the IIC’s connector, but don’t feel any change.
What do you mean with
on top of the IIC’s connector
Show a picture and tell us which pin of the MPU6050 goes to which pin of the Pixhawk
And than always provide which firmware are you using and bes also a parameter file of your settings as nowbody other than you self is knowing your system
Thank you for your reply!I apologise for the way I incorrectly asked the question!
Here is the firmware and parameter file I used.
415V2-ek3-baise.param (13.7 KB)
ardurover(415v2).apj (793.2 KB)
The firmware I’m using is rover 4.1.5.The hardware used is pixhawk 2.4.8.
My IIC connections should be correct, and the question I’m asking is do I need to make drastic changes to the firmware to add additional IMUs? Or what model of IMU would I add that would reduce my workload. I’m sorry if my questions are a bit stupid! I’m sorry I’m a newbie.
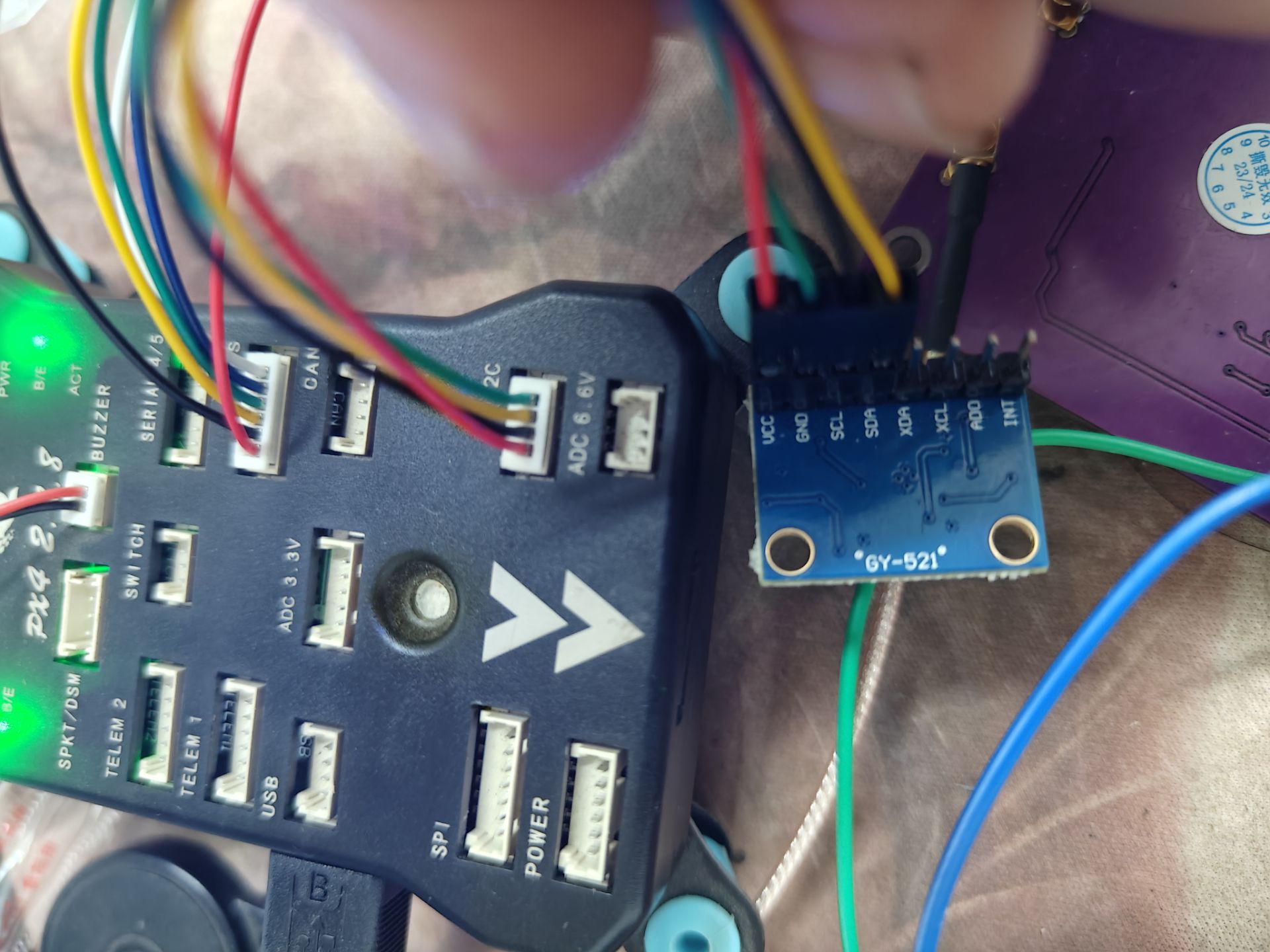
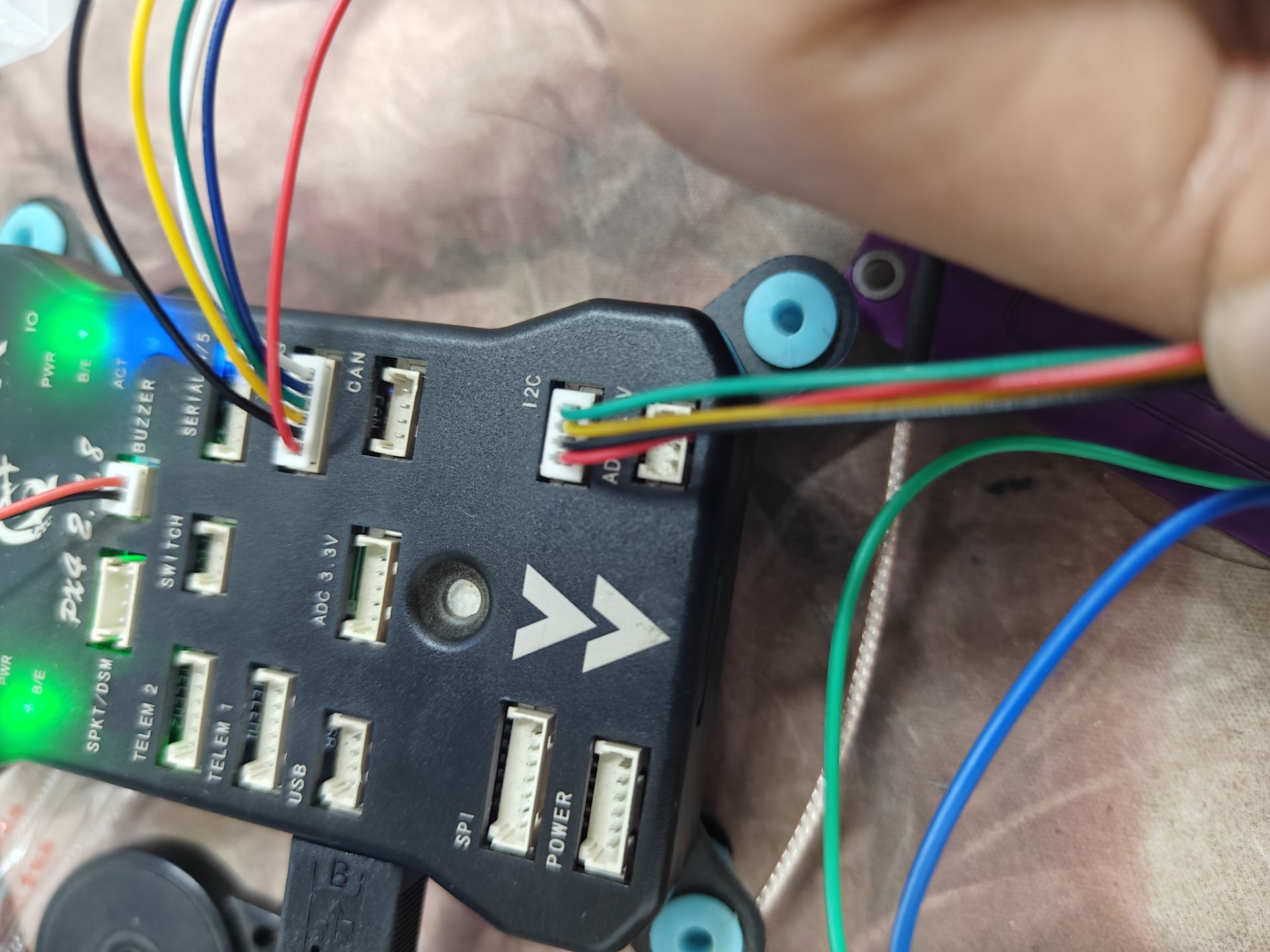
I connected the corresponding pins to the iic interface on the pixhawk 2.4.8.
How many inbuild IMU has your Pixhawk? On your parameter file are already two IMU shown
If it will work at all i think it will need an SPI bus connection. That shitty flight controller has an external one.
1 Like
Two IMUs, the MPU6000 and LSM303D.
You’re right, I’d like to use SPI for an external IMU as well.
Which board definition you are using for your Pixhawk 2.4.8 These board is not listed on the firmware server?
Why you want an additional ext IMU if you have two inbuild?
Note your GY521 board with IMU6050 can not be connected to an SPI-Bus. This is only a IIC component.
I am using it also on my ESP32 based Ardupilot learn and test system.
They use either FMUv3 or Pixhawk1.
It’s supposed to be fmuv2, or stm32f4 if you’re talking about the chip model. I wanted to learn the trick of adding extra sensors by adding an imu, and by the way, I wanted to see if adding an imu would improve positioning accuracy. My ultimate goal is to have my rtk positioning not lose signal in the event of sudden occlusion.
I don’t want to know what supposed to be I want to know which board type firmware you already used. This only you can answer.
To learn something is a really good reason, in this I can fully understand you.
But I don’t think that the position accuracy is improved. So far I understood the system is always only taking one IMU source at a time, but I am not sure.
1 Like
Your best approach would be to replace that Flight Controller with an H7 based one from a reputable manufacturer.
2 Likes
Sorry, I can’t understand what you mean by firmware. Can you give me an example?
I think you programmed your flight controller with some firmware from the ardupilot firmware server. So I want to know which firmware you used. There a several firmware available for different boards. The Pixhawk 2.4.8 is only a clone using the firmware from one of the listed boards. This information is needed .
You send above a link to your .apj file. I want to know from which source you get this .apj file.
I got my firmware from GitHub - ArduPilot/ardupilot: ArduPlane, ArduCopter, ArduRover, ArduSub source.
The apj linked above is fmuv2. They are text readable files with a lot of encoded data. You can see the version details at the very end.
OP isn’t being very helpful in identifying his own issues.
…and 4 year old 4.1 firmware probably isn’t helping…
1 Like
Thanks Yuri, this information I was looking for. I always learn more about ardupilot by yor help :-))
1 Like