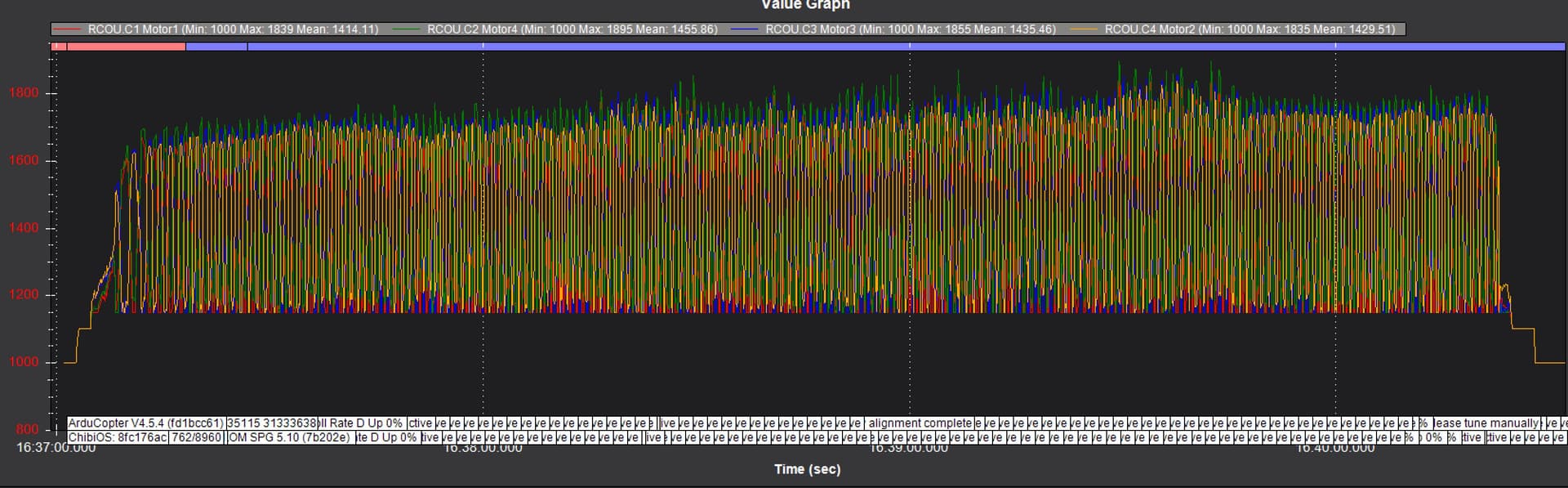
This is my first 3.5" x-frame build, and I have tried AutoTune without any success. The PID values don’t change, and the quadcopter doesn’t twitch in AutoTune mode. I have also increased the DZ values with no effect. Stabilized and AltHold works with small amount of drift and I can fly the quad without any issue. However, I can visibly see a vibration in the frame thus needing some tunning.
Here are the log and parameters files and I am hoping someone can point me to which P, I, and D values I should reduce or increase.
Log file: 2024-12-28 13-37-01.bin - Google Drive
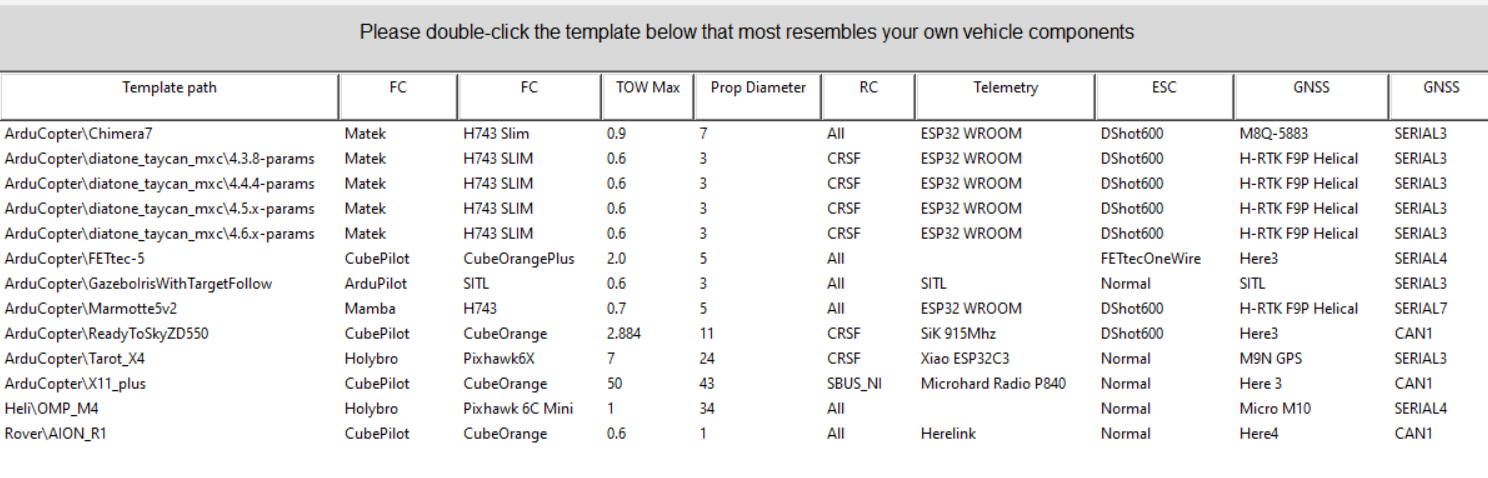
Reset all to default and at your level of knowledge start over and use the Methodic Configurator which you can find by searching for that here on the forum.
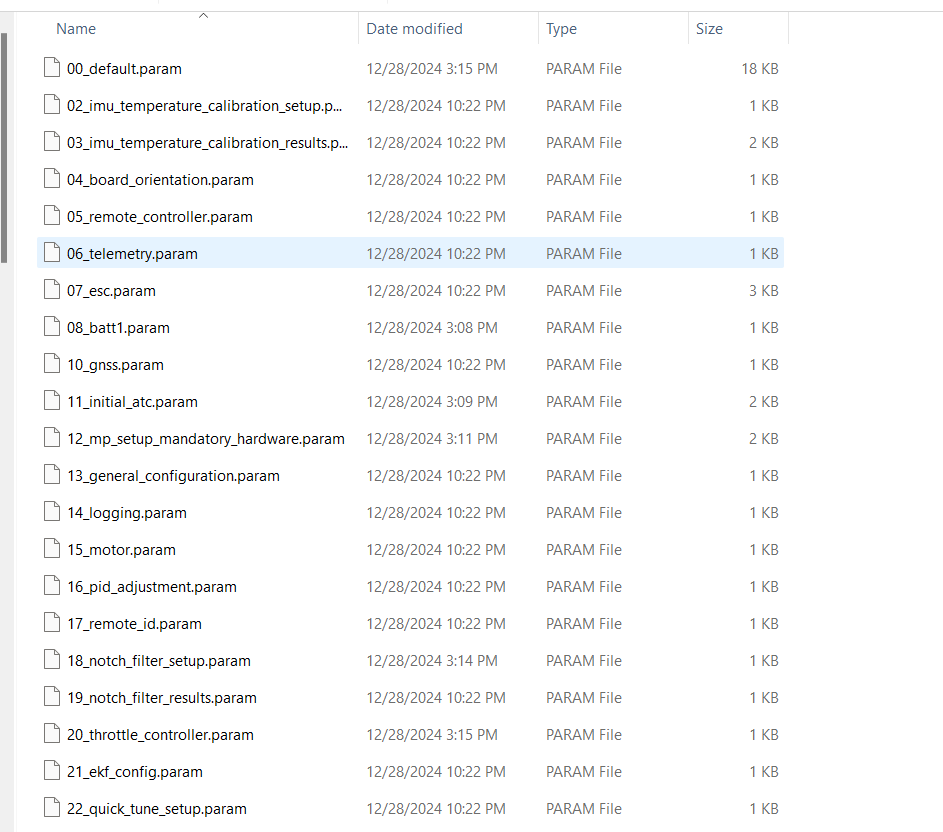
I went through uploading the parameters recommended by the configurator, and now the HUD is not responding and the error message “Too many notches: 38>24”
Because you can not correctly configure and tune a vehicle (that has never been built in this exact combination before) in a single step.
Each vehicle is different and you need to break the process into a sequence of steps.
The hard part has been finding the shortest sequence of steps that works for all copters ranging from 60g to 600kg, and works every time on the first attempt.
@amilcarlucas I am cheating after giving up on the Methodic Configurator because it keeps breaking up other parameters despite all the instructional reading. I saved the PID screenshot of the Marmotte5" and manually changed PID values. It already sounded much better. Once the rain stops, I’ll test it outside and try AutoTune.
One question about AutoTune, I have three-position switch setup as Stabilized, AltHold, and AutoTune. I can see on screen it changes between all three modes. Nothing is set on the “Extended Tunning” page. Is this going to cause AutoTune not to initiate?