I built myself medium-sized Copter Quad X. 15,5" propeller, 10000mA Lipo
flying quite well so far, but I’m not finished with Autotune.
In videos and tutorials is always said / written that takes a Autotune session around 8 minutes.
I have emptied a full battery in the mode and i must stop at the calibration of the Yar axis. After 35Minuten reminded me my notebook (mission planners) to land.
Say, I’ll never finish with Autotune.
Why is it taking so long for me?
It was a windless sunset. I had rarely reposition the copter, in the meantime I could comfortably drink 2 light beer.
Do I have to remove the camera and gimbal so the copter is lighter and it flies 45 min, or try or other firmware?
Flight Controller: Pix4Lite
Arducopter 3.3 (default firmware of Mission Planner)
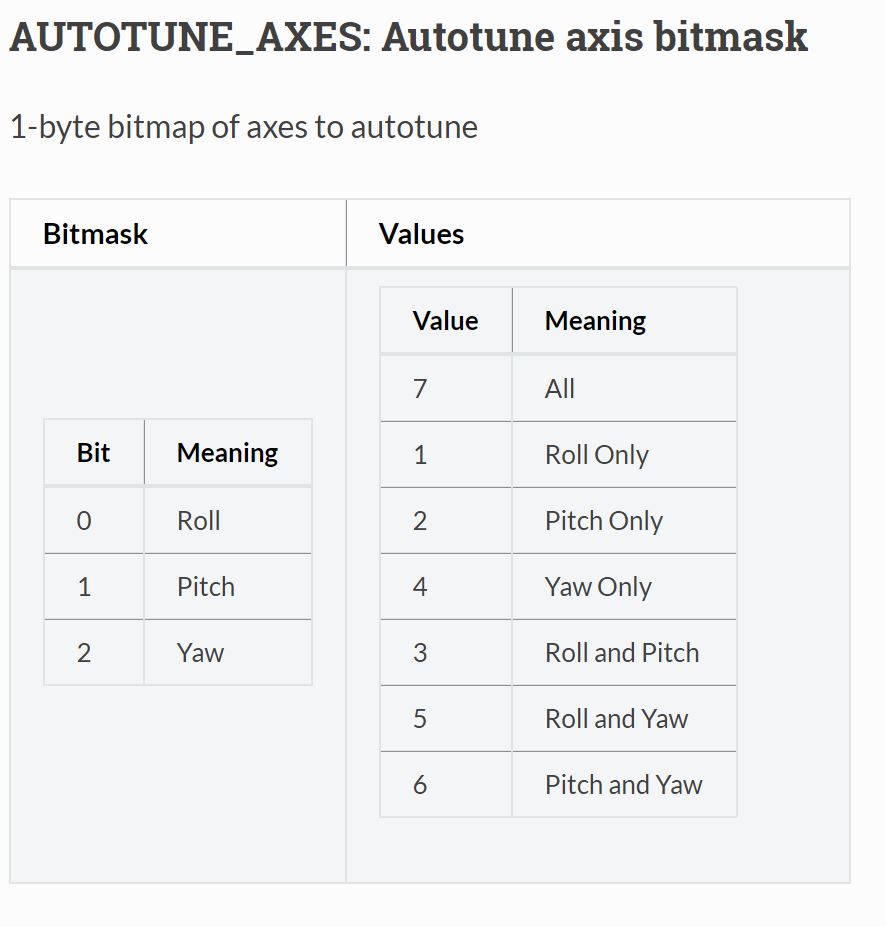
Try autotuning one axis per flight, this is done by setting AUTOTUNE_BITMASK to 1, 2, 4 instead of 7. I managed to autotune at -20 Celsius when battery was emptying very fast.
Have you verified that your CG is pretty much where the FC is? If not, the FC during autotune may struggle to get good readings thus the length in time it may take.
I have a 800mm hex, and can typically get roll and pitch done with one battery (about 13 minutes worth of flight but usually it completes in about 8 minutes). Yaw usually takes much less time.
Well firstly well done for building a quad that will fly 35 mins with a gimbal and camera
It’s recommended to tune each axis separately, and with a fresh battery. Also try it first without the gimbal - autotune sometimes struggles to determine tuning when bits of the frame/FC are flexible, in particular if you have a gimbal that dynamically alters the CG/weight distribution. See if you have better luck first without a gimbal, and one axis at a time.
Thank you for your quick response. I have buid a fork of the “Tragfalter”. http://der-frickler.net/modellbau/planes/tragfalter I’ve also asked if the FC is positioned correctly , but other replicas fly supposedly good.
Next week I’ll try to tune the axes individually .
Hi, I’m not sure the autotune i did was completed it took about 8 minutes, i’m still not sure it ws completed i ran out of battery, i’ve installed flydeck i’ve not message saying completed but i beleive it was…
Could anyone confirm me how to be sure its completed ?
When I have done it there was usually a little tune emitted from the UAV itself as well as a message on the GCS, if you are running out of battery try and set autotune_axes so you only do one at a time or whatever combo you’d like
Thanks for these really efficient answers, i checked the log obviously, i switched back to RTL while the critical battery message occured, i was surprised it took that long 8 minutes. i will try again axis by axis.
Does it have any impact if i run autotune from loiter rather than from stabilise, might be a reason why it took longer ?
Thank you guy’s this has been a sucess, i’ve ran auto tune sequentially Yaw, Roll then Pitch it took 5 minutes for each time it seems that when you run them all together nothing is saved if the full sequence is not finished.
I’ve ran Auto tune from Loiter mode this was really stable my copter did’nt move more than 5 meters horizontally vertically may be 0.1 meter only.