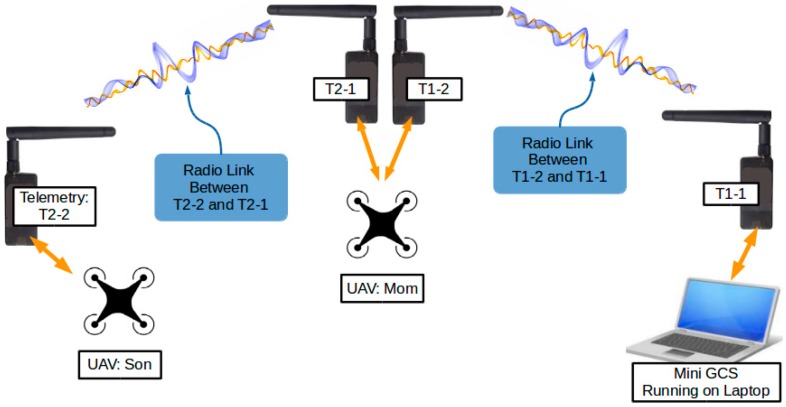
In summary, I want to rescue a drone that has been disconnected from the ground control station by sending a rescue drone close to it to reconnect it to the ground control station and bring the drone back to its starting point.Since I will do this using telemetry, I must first connect the telemetry of the first drone I sent with the telemetry of the second drone I sent, and then direct this connection to the ground control station via the second drone. In this way, my first drone will be able to come near the second drone and things will return normally. Then again I will redirect the connections to the ground control station in their normal form separately.How can I do this using mission planner, also raspberry pi if needed?