I am using Pixhawk 6c Autopilot. I have connected 2 GPS from this Autopilot. I powered my Pixhawk and armed it, and after some time I disarmed it. The .bin file is created in the SD card. I converted this .bin file to .mat matlab file. Now I want to see the data collected from GPS1 and data collected from GPS2. Where will I get this 2 data?..
What are the settings I have to change to get the data of 2nd GPS in the matlab file along with the 1st GPS data…Please help.
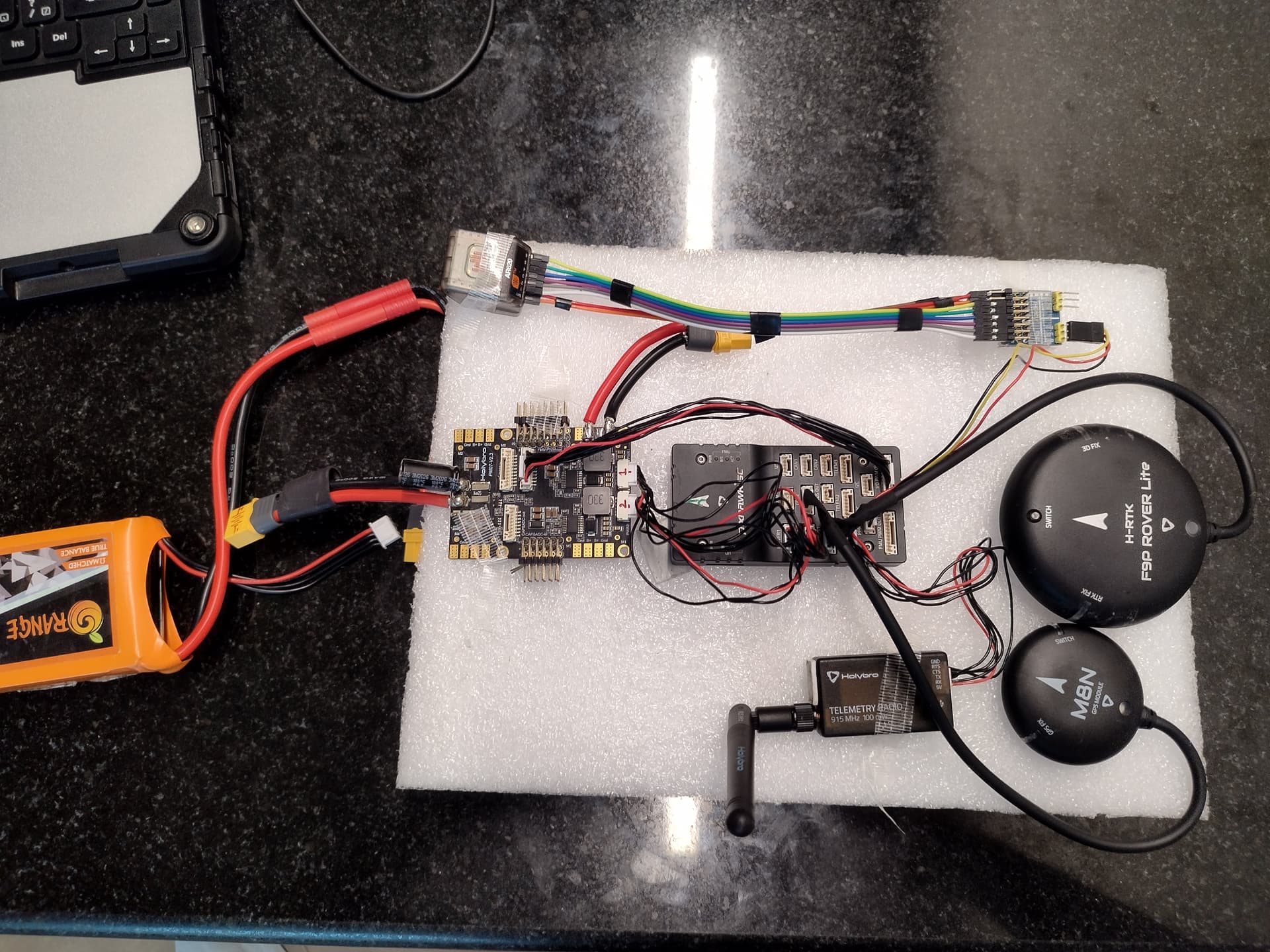
Please look into the picture. I have shown the Photo of the setup which we are using. Also I am attaching a .bin file of this setup. Please let me know how I can get the data of GPS1 and GPS2 Data simultaneously in the SD card. Please let me know if I have to change some parameters anywhere.
You have only activated one GPS (GPS_TYPE,1). I assume you have not configured anything and are using the default parameters. To activate the second GPS, this must be activated in the parameters (GPS2_TYPE,1). See also here GPS Blending (aka Dual GPS) — Plane documentation (ardupilot.org)
Thanks. Now I am getting GPS_0 and GPS_1 data in the SD card. I have used the bellow settings.
GPS2_TYPE = 1 / “AUTO” or the specific number corresponding to the type of GPS
GPS_AUTO_SWITCH = 2 / “Blend”. Alternatively set to 1 / “UseBest” to only use the better GPS. The better GPS is decided based on the GPS’s self reported accuracy.
It says that… " The first GPS’s data appears with an instance number of 0 in the GPS and GPA messages. (ie GPS[0].x, GPA[0].x messages) The second GPS’s data appears with an instance number of 1 in the GPS and GPA messages. The blended GPS data appears with an instance number of 2 in the GPS and GPA messages."
But I am not getting the data for the blended that means I am not getting any instance number of 2.
Can you please figure out the problem. What should I change to solve this problem. I am attaching the .bin of the experiment along with this. Please help to solve this issue.