For some time now there have been GNSS receivers that include processors, IMU’s and barometers. The units with this extra capabilities seem to only be on DroneCan connected GNSS receivers.
I’ve also read that work has been done on ArduPilot targets for some of these units.
But I’ve also read that these GNSS receivers use their sensors and processors along with an Extended Kalman Filter to improve navigation data in case of weak or lapses in GPS signals.
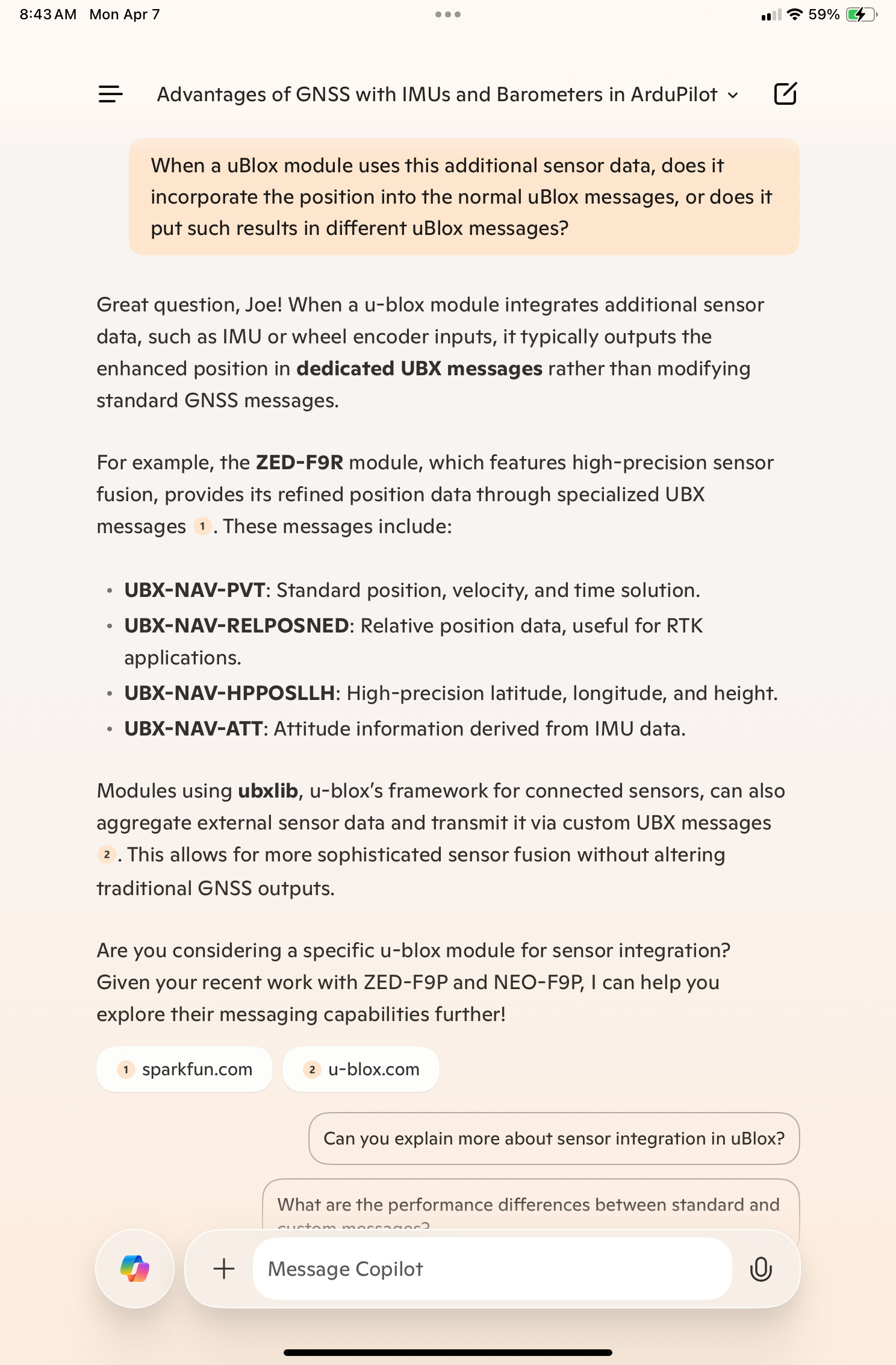
I saw references that suggested that uBlox units can use this data and send certain message types that has this additional navigation data.
The only thing that I came across in ArduPilot about this was a parameter that allows EK3 to use external sensors.
I’m wondering if someone could take a few minutes to explain what the current situation is with ArduPilot regarding these GNSS receivers - and the plans for the future.
Besides curiosity, the main reason for wanting to know more about this is to find out if the extra cost of these enhanced GNSS receivers actually provide better capabilities than simple units with a GPS receiver and a compass alone.
I’m inclined to agree, but it’s a matter of user perspective, of course.
If you prefer the convenient form factor with a CAN connection, the Here4 or HerePro are near direct replacements for legacy Here series hardware and offer significant performance improvement in the GNSS receivers alone.
If you can use bare PCB hardware, there is equal or better performing hardware at a fraction of the cost, and there are alternatives with differing enclosures that may also save on your wallet.
The one advantage of the HERE units is the lights. A convivence - like the buzzer.
I’ve been using simple un-cased gps/compass modules on the little quad I’ve been designing, but I’m thinking of making a mount bracket that allows attaching a HERE unit directly to the top dome, so I don’t have to rely on double sided VHB or Nano tape.
As I’m new to CAD, modeling the attachment to a HERE will be an interesting challenge.
I plan to model after the attachment on the CubePilot iStand, which uses prongs and a single retaining screw.
I’ve found that with proper power wire management, using a mast isn’t necessary. I have an uncased GPS/compass attached directly to the top of a Cube Orange with nano tape and the compass offsets are still tiny.
Here are a couple of reference pics of a Here3+ mast if it helps your modeling endeavors. I’m only guessing that the newer models use the same mounting dimensions (that can be taken directly from the mounting surface).
Thanks - I’ve got a couple here on my workbench. I think the last couple of Here3 units I bought came with them.
I’m trying to decide if I want to model the bracket as part of the dome on my frame, or make a bracket that mounts to a flat surface that can be placed in other locations.
If you have other mounting ideas that you think people would find useful, I’d love to have your suggestions.
Recommend NOT attaching things directly to the Cube via tape or other mechanical attachment. You might get away with it, but it won’t help the vibration situation.
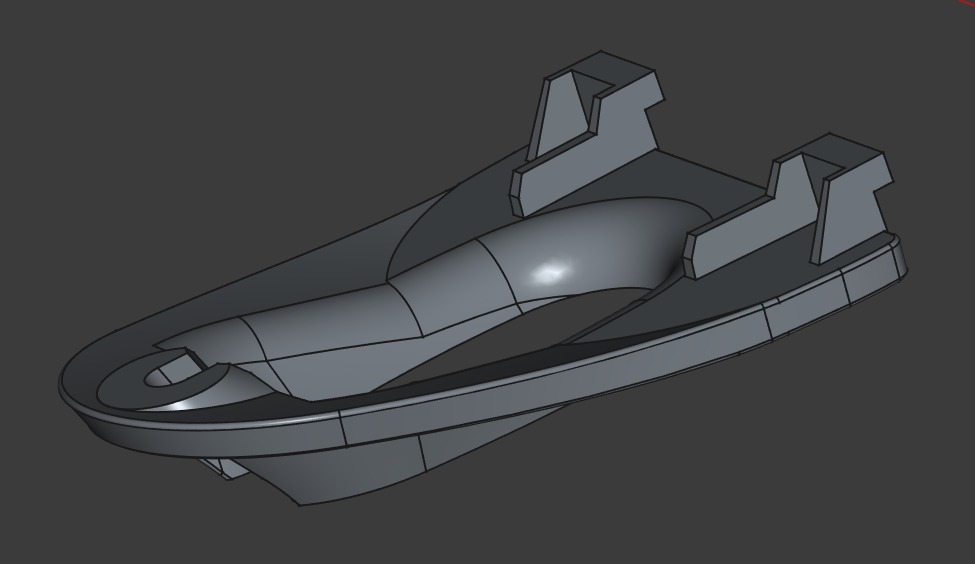
I created a STEP file (and STL too) of the top part of the iStand mount - that can be either just glued directly onto a frame part - or grafted on to a part in CAD.