Hi everyone, I am new to this area, please forgive me if I am asking silly question.
I am doing a drone with RTK system (I am using Holybro F9P base and rover), and considering sending the message via LoRa rather than Sik Radio telemetry. I am connecting the Flight Control (Pixhawk4) with Raspberry Pi (via TELEM 2) and also using the same LoRa module to communicate with my PC (which is connected another LoRa module). Therefore I would like to cut-off the useless data of RTK base sent to Flight Control, however, I do not know what are the necessary data Ardupilot would use for RTK. I have done many research but could not find any document about this topic.
Ardupilot don’t do RTK, we are just forwarding RTK message that are encapsulated into a mavlink message to the GNSS Chip.
To reduce the bandwidth, you should look at your GNSS unit what RTCM messages it supports and selects only those.
Then you can try to fit as much RTCM messges (the RTK message) into a single mavlink message to save some bandwidth and airtime.ArduPilot will extract and forward the messages to the GNSS
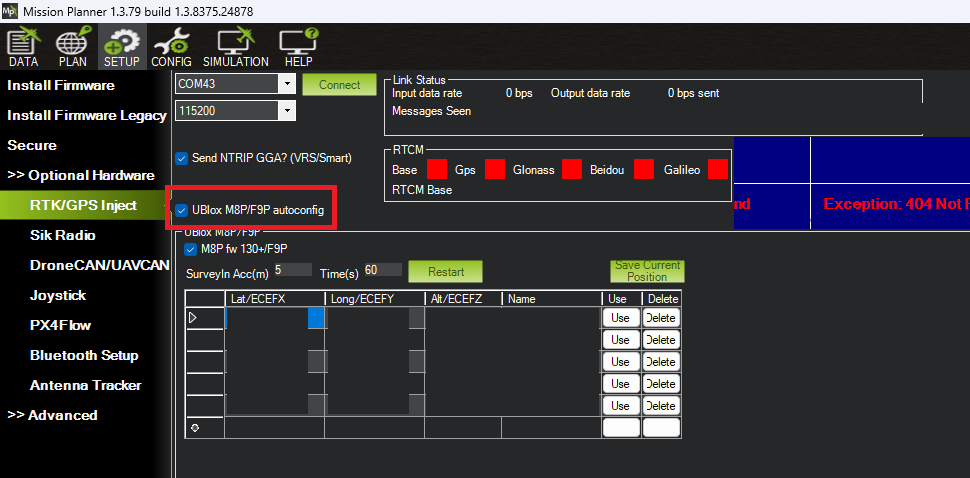
I just realize that if I am using RTK system through Mission Planner, the Mission Planner will auto-config the F9P chips, therefore I can do nothing on configuring the F9P?
Is it possible to find the configuration of “auto-config” of mission planner? so that I can try to reduce the bandwidth
Correct - you can auto configure both onboard F9Ps (via firmware) and fixed base installations (via Mission Planner).
The RTCM3 messages passed via MAVLink telemetry are already very optimized to keep them within the bandwidth available to a telemetry link. I doubt you can streamline it farther and still achieve acceptable results.
I have read the manual of Mission Planner, but could not find where is the section for me to config the F9Ps, could you please teach me how to reach there? And also there is no documentation about mission planner configuration of “auto-config F9P”
I agree that the messages are already optimized, however I still would like to know what’s the RTCM3 messages are included (are they only RTCM3 messages 1005, 1074, 1084, 1094, 1230, 1124?)
I am very new to this area and I would like to explore more to clear my mid, thanks a lot!