Hi all,
how do i backup the PIDs?
And in general how do I make the most complete backup possible in arducopter? Saving the parameters in the full param list doesn’t seem to be a full backup. Thanks
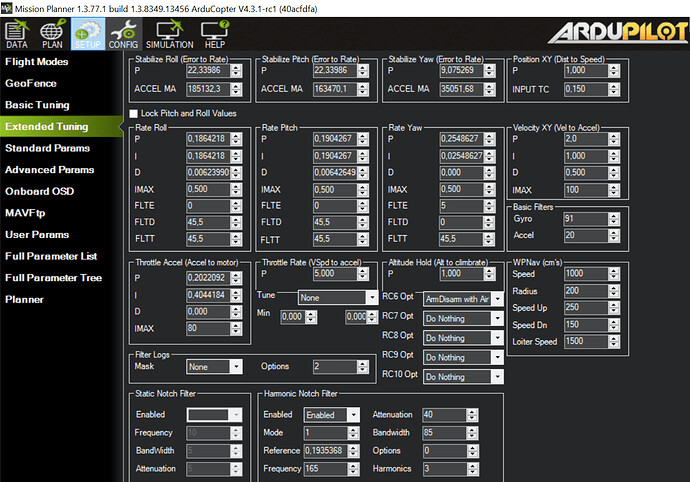
I would like to save these PIDs in a file to avoid writing them manually:
Hi Dave,
I was experimenting with a sonar on the 1 MB kakute F4, I had to compile a custom Fw to get the proximity libraries. the custom server compiles only Fw 4.4 dev. in 4.3 beta rc1 i saved the full parameters list and tried to import on 4.4 dev. result didn’t work and I wrote the Pids manually by copying them from this image (otherwise all pid was at default values).Same with loit_ parameters.
does the backup of the full parameter list work only on identical versions of Fw?
This is a complicated question. It depends if the versions have different parameters. Some versions, although different have the same parameters, but in most cases the newer version has more parameters.
And if some feature is disabled by parameter it’s subparameters will not get saved nor restored
As @amilcarlucas says base parameters and sub-parameters can be the problem. And options for parameters can be different. No way around this really. You will know when this has happened when you get a screen full of “parameter not found” after loading a file.
I don’t typically load a previously saved parameter file for any reason. I use them for archiving purposes and manually make changes if required.
You asked about PID parameters. You can create a file containing just those parameters and only those will be updated when the file loads.